|
|
| Riadok 16: |
Riadok 16: |
|
| |
|
| * Pomocný blok:[[Media:prevod.pdf|Meracie prevodníky]] | | * Pomocný blok:[[Media:prevod.pdf|Meracie prevodníky]] |
|
| |
|
| |
| * Návod na cvičenia:
| |
|
| |
|
| |
|
| |
|
| |
| * Príklad na pripojenie analógového senzora: http://ap.urpi.fei.stuba.sk/sensorwiki/index.php/Acrob007
| |
| * Riadiaca doska Acrob http://ap.urpi.fei.stuba.sk/sensorwiki/index.php/Acrob
| |
| * Arduino homepage https://www.arduino.cc/
| |
|
| |
| <source lang="cpp">
| |
| #define SerialSpeed 9600 //typical values are 9600 or 115200
| |
| #define SampFrequency 10 //sampling frequency in Hz (cycles per second)
| |
| #define positionSensor 5 //define your pin here
| |
|
| |
| int mDelay;
| |
| int adcValue;
| |
| float outputValue;
| |
|
| |
| void setup()
| |
| {
| |
| Serial.begin(SerialSpeed);
| |
| mDelay = 1000/SampFrequency; //calculate delay for proper sampling rate
| |
| }
| |
|
| |
| void loop()
| |
| {
| |
| adcValue = analogRead(positionSensor);
| |
| /* =============================================== */
| |
| outputValue = adcValue; // replace this line with your code
| |
| /* =============================================== */
| |
| Serial.print( outputValue ); //reads the analog port and prints value over serial
| |
| Serial.print('\r');
| |
| delay(mDelay); //delay in milliseconds
| |
|
| |
| }
| |
| </source>
| |
|
| |
|
|
| |
|
Verzia z 14:07, 13. február 2017
Poučenie o Bezpečnosti pri práci
Praktický súhrn Bezpečnosť práce
Úvodný test: MEMS Test 1
Odovzdať:
- Chyby podľa EN 60 770
- Nepresnosť
- Meraná chyba
- Nelinearita
- Hysteréza
- Neopakovateľnosť
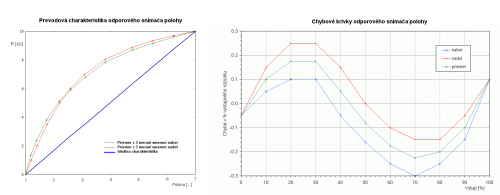
- Graf 1: prevodová charakteristika
- Graf 2: chybové krivky (viď obr.)
Návrat na zoznam cvičení...
