Acrob technical description: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| Riadok 28: | Riadok 28: | ||
Here you can find all the necessary source files to produce the boards:<BR><BR><BR> | Here you can find all the necessary source files to produce the boards:<BR><BR><BR> | ||
[[Obrázok:logo_gEDA.png|200px|left]] | [[Obrázok:logo_gEDA.png|200px|left]] | ||
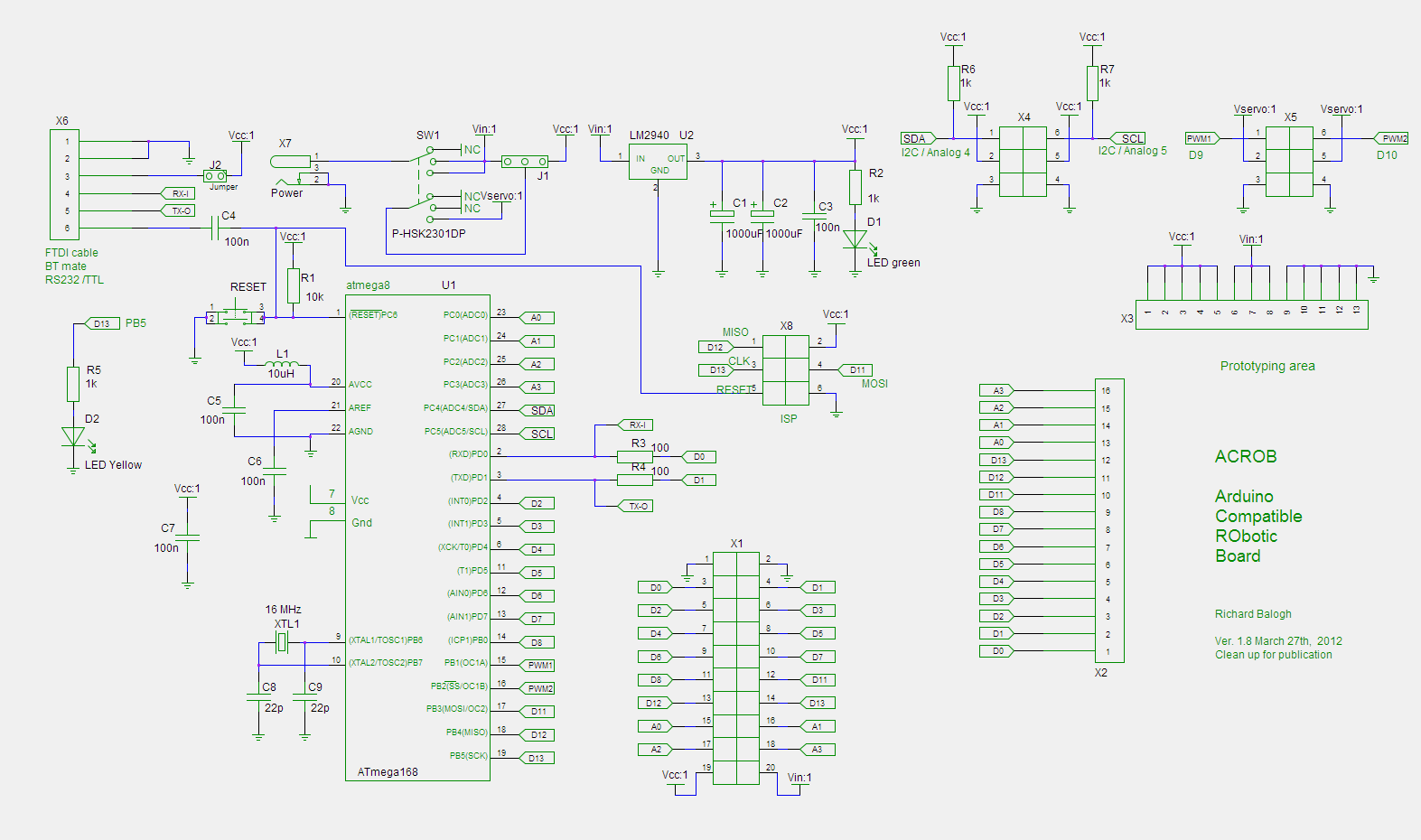
* Schematic diagram: ([[Médiá: | * Schematic diagram: (gEDA [[Médiá:AcrobSchematic18.sch|.sch]], [[Médiá:AcrobSchematic18.pdf|.pdf]], [[Médiá:AcrobSchematic18.png|.png]]) | ||
* [[Médiá:Acrob.pcb|Printed circuit board]] (.pcb - gEDA pcb) | * [[Médiá:Acrob.pcb|Printed circuit board]] (.pcb - gEDA pcb) | ||
* [[Médiá:Acrob.zip|Gerber fab files]] (.zip) | * [[Médiá:Acrob.zip|Gerber fab files]] (.zip) | ||
Verzia z 07:56, 27. marec 2012
Documentation

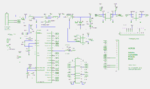
- Schematic diagram
- List of components
- The board description
- Connectors, pinouts, jumpers
- Resources
-
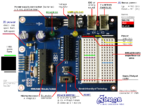 The Board
The Board -
-

-
 pcb A
pcb A -
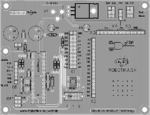 pcb B
pcb B -
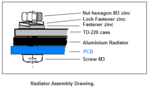 radiator mech
radiator mech





Sources

Acrob board is open hardware. Schematic diagram and final pcb were designed
using the gEDA suite of programs.
Here you can find all the necessary source files to produce the boards:

- Schematic diagram: (gEDA .sch, .pdf, .png)
- Printed circuit board (.pcb - gEDA pcb)
- Gerber fab files (.zip)
{kind=link}
Information and Links
- Arduino
- Language Reference
- Robotics with Boe-Bot Robot (BasicStamp)
Components
- ATmega328 Description + Datasheet
- FTDI Basic Breakout board
- LM2940-5.0 Description + Datasheet
Tips and troubleshooting
- Note: configuring Reset in Windows - http://www.arduino.cc/en/Guide/ArduinoPro
