Robotics: Rozdiel medzi revíziami
Z SensorWiki
(→L2 Position in 2D) |
|||
| (9 medziľahlých úprav od rovnakého používateľa nie je zobrazených.) | |||
| Riadok 1: | Riadok 1: | ||
Helper page for the Peter Corke: Introduction to robotics MOOC. | Helper page for the Peter Corke: Introduction to robotics MOOC. | ||
| + | |||
| + | === L1 Introduction === | ||
| + | |||
| + | === L2 Position in 2D === | ||
| + | |||
| + | Let's create a 2 dimensional rotation matrix for a certain rotation. | ||
| + | |||
| + | <div class="toccolours mw-collapsible" style="width:80em"> | ||
| + | <source lang="matlab"> | ||
| + | rot2(0) % zero rotation | ||
| + | R = rot2(pi/2) % pi/2 radian rotation stored in R matrix | ||
| + | rot2(30,'deg') % rotation 30 degrees | ||
| + | |||
| + | c1 = R(:,1) % first column of the R | ||
| + | c2 = R(:,2) % second column of R | ||
| + | |||
| + | dot(c1,c2) % dot product of two vectors | ||
| + | ans = 0 lebo su pravouhle | ||
| + | |||
| + | det(R) % determinant | ||
| + | ans = 1 lebo su ortogonalne | ||
| + | |||
| + | inv(R) % inverse matrix | ||
| + | R' % transposition | ||
| + | % mali by byt rovnake | ||
| + | |||
| + | trplot2(R) % plot the rotated coordination frame | ||
| + | |||
| + | transl2(1,2) % creates HOMOGENOUS Transformation matrix for translation | ||
| + | rot2(30, 'deg') % creates Rotation matrix | ||
| + | trot2(30, 'deg') % homogeneous transformation matrix equivalent to the two dimensional rotation matrix | ||
| + | |||
| + | transl2(1,2) * trot2(30, 'deg') % homogenous matrix consisting of both the rotational and translational parts | ||
| + | |||
| + | se2(1, 2, 30, 'deg') % omogenous matrix with both rotational and translation parts can be created directly | ||
| + | |||
| + | axis([0 5 0 5]) | ||
| + | axis square | ||
| + | hold on | ||
| + | |||
| + | T1 = se2(1, 2, 30, 'deg') | ||
| + | trplot2(T1, 'frame', '1', 'color', 'b') | ||
| + | |||
| + | T2 = se2(2,1,0) | ||
| + | trplot2(T2, 'frame', '2', 'color', 'r') | ||
| + | |||
| + | T3 = T1 * T2 | ||
| + | trplot2(T3, 'frame', '3', 'color', 'g') | ||
| + | |||
| + | T4 = T2 * T1 | ||
| + | trplot2(T4, 'frame', '4', 'color', 'c') | ||
| + | |||
| + | P = [3 2]' % Create a point using the following notation | ||
| + | plot_point(P, '*') | ||
| + | |||
| + | % To determine the coordinate of the point with respect to coordinate frame one, | ||
| + | % use the inverse of the relative pose 1 and multiply it by the points coordinate | ||
| + | % in the homogeneous form (by appending a 1 to the vector P). | ||
| + | P1 = inv(T1) * [P ; 1] | ||
| + | </source></div> | ||
| + | |||
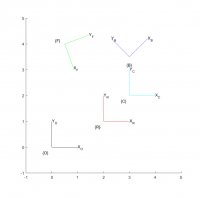
| + | Nakreslime obrazok podobny tomu v prednaske | ||
| + | |||
| + | <source lang="matlab"> | ||
| + | axis([-1 5 -1 5]) | ||
| + | axis square | ||
| + | hold on | ||
| + | |||
| + | T0 = se2(0, 0, 0, 'deg') | ||
| + | trplot2(T0, 'frame', 'O', 'color', 'k') | ||
| + | |||
| + | T1 = se2(2,1,0) | ||
| + | trplot2(T1, 'frame', 'R', 'color', 'r') | ||
| + | |||
| + | T2 = se2(3,2,0) | ||
| + | trplot2(T2, 'frame', 'C', 'color', 'c') | ||
| + | |||
| + | T3 = se2(3,3.5,45,'deg') | ||
| + | trplot2(T3, 'frame', 'B', 'color', 'b') | ||
| + | |||
| + | T4 = se2(0.5,4,-70,'deg') | ||
| + | trplot2(T4, 'frame', 'F', 'color', 'g') | ||
| + | |||
| + | T4 = | ||
| + | |||
| + | 0.3420 0.9397 0.5000 | ||
| + | -0.9397 0.3420 4.0000 | ||
| + | 0 0 1.0000 | ||
| + | |||
| + | </source> | ||
| + | |||
| + | Vysledok | ||
| + | |||
| + | [[Súbor:CoordinateFrames2D.png|200px]] | ||
| + | |||
| + | Exercise | ||
| + | <div class="toccolours mw-collapsible" style="width:40em"> | ||
| + | <source lang="matlab"> | ||
| + | % DO NOT CHANGE THE FOLLOWING LINES | ||
| + | PA_0 = [6.5; 4.3]; % point A with respect to {0} | ||
| + | PB_2 = [1.2; -2.7]; % point B with respect to {2} | ||
| + | |||
| + | % Modify the following lines to return the correct values | ||
| + | R1 = | ||
| + | T1 = | ||
| + | T2 = | ||
| + | PA_2 = | ||
| + | PB_1 = | ||
| + | D_AB = | ||
| + | </SOURcE> | ||
| + | |||
| + | 1. Compute an SO(2) rotation matrix that corresponds to a rotation of -50 degrees and place the result in the workspace variable R1. | ||
| + | R1 = rot2(-50, 'deg'); | ||
| + | 2. Compute an SE(2) homogenous transformation matrix that corresponds to a translation of 4 in the y-direction and 3 in the x-direction. Place the result in the workspace variable T1. | ||
| + | T1 = transl2(3, 4); % or e.g.: | ||
| + | T1 = se2(3,4,0); | ||
| + | 3. Compute an SE(2) homogenous transformation matrix that corresponds to a translation of 5 in the x-direction and 6 in the y-direction and then a rotation of -30 degrees. Place the result in the workspace variable T2. | ||
| + | T2 = se2(5,6,-30,'deg'); | ||
| + | 4. Consider now that T2 represents the pose of the coordinate frame {2}. The coordinate of point A in the world {0} coordinate frame is given by the workspace variable PA_0. Determine the coordinate of the point with respect to frame {2} and place the result in the workspace variable PA_2. | ||
| + | |||
| + | 5. Consider now that T1 represents the pose of the coordinate frame {1}. The coordinate of point B with respect to frame {2} is given by the workspace variable PB_2. 6. Determine the coordinate of point B with respect to the coordinate frame {1}, and place the result in the workspace variable PB_1. | ||
| + | 7. Determine the Euclidean distance between point A and point B and place the result in the workspace variable D_AB. | ||
| + | </div> | ||
=== L3.10 2-axis representation === | === L3.10 2-axis representation === | ||
| Riadok 13: | Riadok 136: | ||
* A=(−1.8833,6.1427,1.0000),O=(1.0000,−0.4925,4.9085) | * A=(−1.8833,6.1427,1.0000),O=(1.0000,−0.4925,4.9085) | ||
* A=(1.0000,−0.4925,4.9085),O=(2.9914,1.0000,−0.5091) | * A=(1.0000,−0.4925,4.9085),O=(2.9914,1.0000,−0.5091) | ||
| − | * A=(1.0000,−0.4925,4.9085),O=(−1.8833,6.1427,1.0000) | + | * A=(1.0000,−0.4925,4.9085),O=(−1.8833,6.1427,1.0000) (CORRECT) |
* A=(−1.8833,6.1427,1.0000),O=(2.9914,1.0000,−0.5091) | * A=(−1.8833,6.1427,1.0000),O=(2.9914,1.0000,−0.5091) | ||
| Riadok 45: | Riadok 168: | ||
1. How can matrices R=oa2r(o,a) and r=[n' o' a'] proved to be equivalent? | 1. How can matrices R=oa2r(o,a) and r=[n' o' a'] proved to be equivalent? | ||
2. Why is a difference appearing in the yaw angle calculated from matrix R and from matrix r? | 2. Why is a difference appearing in the yaw angle calculated from matrix R and from matrix r? | ||
| + | |||
| + | |||
| + | |||
| + | Explanation | ||
| + | |||
| + | We can really only do this by trial error, try each of the potential answers and see if it gives the desired rotation matrix. Note that the arguments to the oa2r() function are given in the order O then A, the reverse of what's above. | ||
| + | |||
| + | >> oa2r( [1.0000, -0.4925, 4.9085], [-1.8833, 6.1427, 1.0000]) | ||
| + | >> oa2r( [2.9914, 1.0000, -0.5091], [1.0000, -0.4925, 4.9085]) | ||
| + | >> oa2r( [-1.8833, 6.1427, 1.0000], [1.0000, -0.4925, 4.9085]) | ||
| + | >> oa2r( [2.9914, 1.0000, -0.5091], [-1.8833, 6.1427, 1.0000]) | ||
| + | |||
| + | |||
| + | |||
| + | === L3.12 Quaternions === | ||
| + | |||
| + | |||
| + | Exercise | ||
| + | |||
| + | * In the MATLAB workspace create a rotation matrix equivalent to a rotation of 30° about the x-axis, and store it in the workspace as the variable R1. | ||
| + | * Create another which is equivalent to a rotation of 60° about the y-axis and store that in the variable R2. | ||
| + | * Create a unit-quaternion equivalent to the rotation R1 and store it in the workspace as the variable q1. | ||
| + | * Use the notation q1.R to convert the quaternion to a rotation matrix. Compare this to the original rotation matrix R1. | ||
| + | * Create another quaternion, call this one q2, equivalent to the rotation matrix R2. | ||
| + | * Inspect the vector part of the quaternions, what axes are these parallel to? | ||
| + | * Multiply quaternion q1 by quaternion q2, using the standard MATLAB multiplication operation. | ||
| + | * Compute the inverse of quaternion q1, using the MATLAB function inv. | ||
| + | * Use the .R notation from above to convert the quaternion to a rotation matrix. Compare this result to directly computing the inverse of R1. | ||
| + | * Multiply quaternion q1 by its inverse and inspect the result. Convert the result back to a rotation matrix. | ||
| + | |||
| + | Hints/Solutions to Exercise | ||
| + | |||
| + | R1 = rotx(30, 'deg') | ||
| + | R2 = roty(60, 'deg') | ||
| + | |||
| + | q1 = Quaternion(R1) | ||
| + | |||
| + | q1.R | ||
| + | |||
| + | q2 = Quaternion(R2) | ||
| + | |||
| + | q1*q2 | ||
| + | |||
| + | ans.R | ||
| + | R1*R2 | ||
| + | |||
| + | inv(q1) | ||
| + | ans.R | ||
| + | inv(R1) | ||
| + | |||
| + | q1*inv(q1) | ||
| + | ans.R | ||
Aktuálna revízia z 14:12, 3. október 2016
Helper page for the Peter Corke: Introduction to robotics MOOC.
L1 Introduction
L2 Position in 2D
Let's create a 2 dimensional rotation matrix for a certain rotation.
rot2(0) % zero rotation
R = rot2(pi/2) % pi/2 radian rotation stored in R matrix
rot2(30,'deg') % rotation 30 degrees
c1 = R(:,1) % first column of the R
c2 = R(:,2) % second column of R
dot(c1,c2) % dot product of two vectors
ans = 0 lebo su pravouhle
det(R) % determinant
ans = 1 lebo su ortogonalne
inv(R) % inverse matrix
R' % transposition
% mali by byt rovnake
trplot2(R) % plot the rotated coordination frame
transl2(1,2) % creates HOMOGENOUS Transformation matrix for translation
rot2(30, 'deg') % creates Rotation matrix
trot2(30, 'deg') % homogeneous transformation matrix equivalent to the two dimensional rotation matrix
transl2(1,2) * trot2(30, 'deg') % homogenous matrix consisting of both the rotational and translational parts
se2(1, 2, 30, 'deg') % omogenous matrix with both rotational and translation parts can be created directly
axis([0 5 0 5])
axis square
hold on
T1 = se2(1, 2, 30, 'deg')
trplot2(T1, 'frame', '1', 'color', 'b')
T2 = se2(2,1,0)
trplot2(T2, 'frame', '2', 'color', 'r')
T3 = T1 * T2
trplot2(T3, 'frame', '3', 'color', 'g')
T4 = T2 * T1
trplot2(T4, 'frame', '4', 'color', 'c')
P = [3 2]' % Create a point using the following notation
plot_point(P, '*')
% To determine the coordinate of the point with respect to coordinate frame one,
% use the inverse of the relative pose 1 and multiply it by the points coordinate
% in the homogeneous form (by appending a 1 to the vector P).
P1 = inv(T1) * [P ; 1]
Nakreslime obrazok podobny tomu v prednaske
axis([-1 5 -1 5])
axis square
hold on
T0 = se2(0, 0, 0, 'deg')
trplot2(T0, 'frame', 'O', 'color', 'k')
T1 = se2(2,1,0)
trplot2(T1, 'frame', 'R', 'color', 'r')
T2 = se2(3,2,0)
trplot2(T2, 'frame', 'C', 'color', 'c')
T3 = se2(3,3.5,45,'deg')
trplot2(T3, 'frame', 'B', 'color', 'b')
T4 = se2(0.5,4,-70,'deg')
trplot2(T4, 'frame', 'F', 'color', 'g')
T4 =
0.3420 0.9397 0.5000
-0.9397 0.3420 4.0000
0 0 1.0000
Vysledok

Exercise
% DO NOT CHANGE THE FOLLOWING LINES
PA_0 = [6.5; 4.3]; % point A with respect to {0}
PB_2 = [1.2; -2.7]; % point B with respect to {2}
% Modify the following lines to return the correct values
R1 =
T1 =
T2 =
PA_2 =
PB_1 =
D_AB =
1. Compute an SO(2) rotation matrix that corresponds to a rotation of -50 degrees and place the result in the workspace variable R1.
R1 = rot2(-50, 'deg');
2. Compute an SE(2) homogenous transformation matrix that corresponds to a translation of 4 in the y-direction and 3 in the x-direction. Place the result in the workspace variable T1.
T1 = transl2(3, 4); % or e.g.: T1 = se2(3,4,0);
3. Compute an SE(2) homogenous transformation matrix that corresponds to a translation of 5 in the x-direction and 6 in the y-direction and then a rotation of -30 degrees. Place the result in the workspace variable T2.
T2 = se2(5,6,-30,'deg');
4. Consider now that T2 represents the pose of the coordinate frame {2}. The coordinate of point A in the world {0} coordinate frame is given by the workspace variable PA_0. Determine the coordinate of the point with respect to frame {2} and place the result in the workspace variable PA_2.
5. Consider now that T1 represents the pose of the coordinate frame {1}. The coordinate of point B with respect to frame {2} is given by the workspace variable PB_2. 6. Determine the coordinate of point B with respect to the coordinate frame {1}, and place the result in the workspace variable PB_1. 7. Determine the Euclidean distance between point A and point B and place the result in the workspace variable D_AB.
L3.10 2-axis representation
Check understanding: The rotation matrix
0.9363 −0.2896 0.1987 0.3130 0.9447 −0.0978 −0.1593 0.1538 0.9752
is equivalent to the 2-vector representation:
- A=(−1.8833,6.1427,1.0000),O=(1.0000,−0.4925,4.9085)
- A=(1.0000,−0.4925,4.9085),O=(2.9914,1.0000,−0.5091)
- A=(1.0000,−0.4925,4.9085),O=(−1.8833,6.1427,1.0000) (CORRECT)
- A=(−1.8833,6.1427,1.0000),O=(2.9914,1.0000,−0.5091)
Solution:
o=[-1.8833, 6.1427, 1.0000]; %Orientation vector a=[1.0000, -0.4925, 4.9085]; %Approach vector R=oa2r(o,a) %To create rotation matrix R from o and a vectors R = 0.9363 -0.2896 0.1987 0.3130 0.9447 -0.0978 -0.1593 0.1538 0.9752 n=cross(o,a) %To calculate normal vector n n = 30.6439 10.2442 -5.2152 r=[n' o' a'] %To create rotation matrix r with columns of n, o, a vectors # Wrong, n, o and a are unit vectors: r=[unit(n') unit(o') unit(a')] %To create rotation matrix r with columns of n, o, a vectors tr2rpy(R) %To calculate roll, pitch and yaw angles from rotation matrix R tr2rpy(r) %To calculate roll, pitch and yaw angles from rotation matrix r
Can you please explain:
1. How can matrices R=oa2r(o,a) and r=[n' o' a'] proved to be equivalent? 2. Why is a difference appearing in the yaw angle calculated from matrix R and from matrix r?
Explanation
We can really only do this by trial error, try each of the potential answers and see if it gives the desired rotation matrix. Note that the arguments to the oa2r() function are given in the order O then A, the reverse of what's above.
>> oa2r( [1.0000, -0.4925, 4.9085], [-1.8833, 6.1427, 1.0000]) >> oa2r( [2.9914, 1.0000, -0.5091], [1.0000, -0.4925, 4.9085]) >> oa2r( [-1.8833, 6.1427, 1.0000], [1.0000, -0.4925, 4.9085]) >> oa2r( [2.9914, 1.0000, -0.5091], [-1.8833, 6.1427, 1.0000])
L3.12 Quaternions
Exercise
- In the MATLAB workspace create a rotation matrix equivalent to a rotation of 30° about the x-axis, and store it in the workspace as the variable R1.
- Create another which is equivalent to a rotation of 60° about the y-axis and store that in the variable R2.
- Create a unit-quaternion equivalent to the rotation R1 and store it in the workspace as the variable q1.
- Use the notation q1.R to convert the quaternion to a rotation matrix. Compare this to the original rotation matrix R1.
- Create another quaternion, call this one q2, equivalent to the rotation matrix R2.
- Inspect the vector part of the quaternions, what axes are these parallel to?
- Multiply quaternion q1 by quaternion q2, using the standard MATLAB multiplication operation.
- Compute the inverse of quaternion q1, using the MATLAB function inv.
- Use the .R notation from above to convert the quaternion to a rotation matrix. Compare this result to directly computing the inverse of R1.
- Multiply quaternion q1 by its inverse and inspect the result. Convert the result back to a rotation matrix.
Hints/Solutions to Exercise
R1 = rotx(30, 'deg') R2 = roty(60, 'deg') q1 = Quaternion(R1) q1.R q2 = Quaternion(R2) q1*q2 ans.R R1*R2 inv(q1) ans.R inv(R1) q1*inv(q1) ans.R