Acrob technical description
Zo stránky SensorWiki
Documentation
- Schematic diagram
- List of components
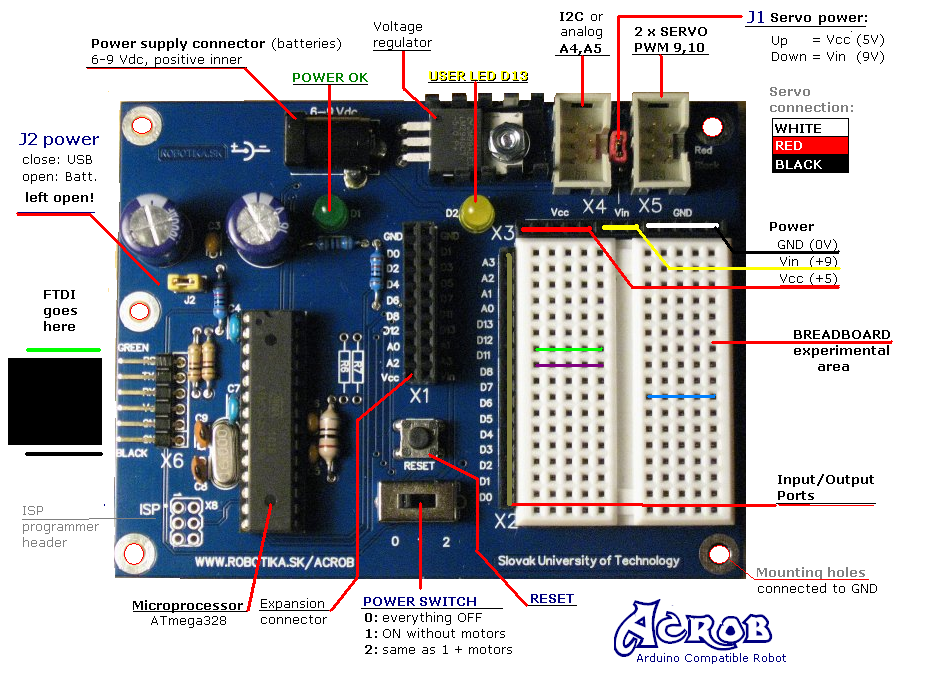
- The board description
- Connectors, pinouts, jumpers

Information and Links
- Arduino
- Language Reference
- Robotics with Boe-Bot Robot (BasicStamp)
Components
- ATmega328 Description + Datasheet
- FTDI Basic Breakout board
- LM2940-5.0 Description + Datasheet
Tips and troubleshooting
- Note: configuring Reset in Windows - http://www.arduino.cc/en/Guide/ArduinoPro
