MMP Cvičenie 4: Rozdiel medzi revíziami
Zo stránky SensorWiki
| Riadok 12: | Riadok 12: | ||
Máte k dispozícii vývojovú dosku '''Acrob''' ([[Acrob technical description|popis]],[[Médiá:AcrobSchematic.pdf|schéma zapojenia]]) a s procesorom ATmega328P ([http://ap.urpi.fei.stuba.sk/mmp/ATmega328.pdf datasheet]). | Máte k dispozícii vývojovú dosku '''Acrob''' ([[Acrob technical description|popis]],[[Médiá:AcrobSchematic.pdf|schéma zapojenia]]) a s procesorom ATmega328P ([http://ap.urpi.fei.stuba.sk/mmp/ATmega328.pdf datasheet]). | ||
V tejto úlohe sa predpokladá znalosť funkcie časovača T1 z prednášky (datasheet, str. | V tejto úlohe sa predpokladá znalosť funkcie časovača T1 z prednášky (datasheet, str.114 -- 141). | ||
Procesor je nakonfigurovaný na prácu s externým kryštálovým oscilátorom 16 000 MHz (fuses). | Procesor je nakonfigurovaný na prácu s externým kryštálovým oscilátorom 16 000 MHz (fuses). | ||
Demonštračný program je tuto: [[Médiá:AcrobTest4.hex|acrobtest4.hex]] | Demonštračný program je tuto: [[Médiá:AcrobTest4.hex|acrobtest4.hex]] | ||
Verzia z 10:42, 12. október 2010
16-bitové počítadlo a časovač T1 s prerušením
Literatúra:
- Newbie's Guide to AVR Timers
- The traps when using interrupts
- Ako používať časovače v AVR C
- Prednáška o prerušeniach (Ing. Chamraz)
Rekapitulácia
Máte k dispozícii vývojovú dosku Acrob (popis,schéma zapojenia) a s procesorom ATmega328P (datasheet).
V tejto úlohe sa predpokladá znalosť funkcie časovača T1 z prednášky (datasheet, str.114 -- 141). Procesor je nakonfigurovaný na prácu s externým kryštálovým oscilátorom 16 000 MHz (fuses). Demonštračný program je tuto: acrobtest4.hex
Časovač T1
Pozri AVR ExampleT1pooled.c
Úlohy
- Program doplňte podľa pokynov asistenta a odsimulujte.
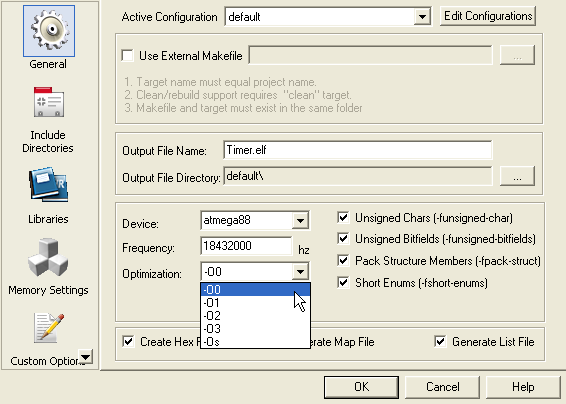
Pozn.: Treba vypnúť optimalizáciu! (Project/Project options Pozri obr.) - Doplňte chýbajúce časti programu tak, aby LED blikala s frekvenciou 1 s.
- Vyskúšajte na svojej doske.
{kind=link}
Prerušenia v AVR-GCC
Kompilátor AVR-GCC má obsluhu prerušení vyriešenú tak, že tabuľka s vektormi jednotlivých prerušení ukazuje na obslužné rutiny s preddefinovanými názvami. Pri výskyte niektorého z povolených prerušení sa vykoná rutina so zodpovedajúcim názvom.
Vo vašom kóde použijete obslužné funkcie pre prerušenie napr. takto (obsluha prerušenia z AD prevodníka):
#include <avr/interrupt.h>
ISR(ADC_vect)
{
// user code here
}
Takáto obsluha prerušenia sa potom spustí so globálnym zákazom prerušení (jednoúrovňové), ktoré sa po skončení prípadne zasa obnovia. Obsluha sa skončí špeciálnou inštrukciiou RETI, preto sa nedá zavolať z programu ako bežná funkcia.
Niektoré názvy vektorov:
ADC Conversion Complete ADC_vect External Interrupt Request 0 INT0_vect External Interrupt Request 1 INT1_vect External Interrupt Request 2 INT2_vect Timer/Counter1 Overflow TIMER1_OVF_vect USART, Rx Complete USART_RXC_vect USART, Tx Complete USART_TXC_vect
Ak potrebujete prerušenia povoliť, resp. zakázať, máte k dispozícii funkcie
void sei(void); // Enables interrupts by setting the global interrupt mask.
void cli(void); // Disables all interrupts by clearing the global interrupt mask.
Obe funkcie sa preložia do jedinej asm inštrukcie, bez zbytočného pridaného kódu.
Pozn.: Ak chcete používať v obsluhe premenné, ktorých obsah chcete uchovať napr. až do ďalšieho prerušenia, musia byť deklarované ako static. Ak chcete mať v obsluhe prerušenia prístup aj k nejakej premennej v hlavnom programe, musí byť deklarovaná ako globálna. Navyše, ak kompilátor pri preklade nenájde miesto, kde sa premenná mení, vyhodí ju z programu úplne. Nie je taký múdry, aby zistil, že s ňou manipulujete v ISR nezistí, preto použite pri deklarácii volatile.
Úloha
- Doplňte program o vyhodnocovanie pretečenia časovača v prerušení.
Pozri AVR ExampleT1int.c