Kitronik :MOVE mini MK2: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
Bez shrnutí editace |
||
| Riadok 9: | Riadok 9: | ||
* Product page https://kitronik.co.uk/products/5652-move-mini-mk2-buggy-kit-excl-microbit | * Product page https://kitronik.co.uk/products/5652-move-mini-mk2-buggy-kit-excl-microbit | ||
* Aplikácia na ovládanie cez mobil (Android): https://play.google.com/store/apps/details?id=com.kitronik.blemove&gl=SK | * Aplikácia na ovládanie cez mobil (Android): https://play.google.com/store/apps/details?id=com.kitronik.blemove&gl=SK | ||
Základná verzia robota je bez senzorov, preto odporúčame doplniť Sensor interface board a k nej je potom možné doplniť senzor na detekciu čiary ako aj ultrazvukový senzor. | |||
P0 5x neopixel RGB LED | |||
P1 servo 1 | |||
P2 servo 2 | |||
P3 voľné | |||
P4 voľné | |||
P8 ultrazvukový senzor Trigger | |||
P10 ultrazvukový senzor Echo | |||
P15 ľavý senzor čiary | |||
P16 pravý senzor čiary | |||
P19 i2c zbernica SCL | |||
P20 i2c zbernica SDA | |||
Verzia z 11:56, 24. január 2022
Druhá, vylepšená verzia :MOVE od firmy Kitronik. Dodáva sa v rozloženom stave, po zložení sa už nepredpokladá prerábanie.

Kitronik :MOVE mk2.
- Product page https://kitronik.co.uk/products/5652-move-mini-mk2-buggy-kit-excl-microbit
- Aplikácia na ovládanie cez mobil (Android): https://play.google.com/store/apps/details?id=com.kitronik.blemove&gl=SK
Základná verzia robota je bez senzorov, preto odporúčame doplniť Sensor interface board a k nej je potom možné doplniť senzor na detekciu čiary ako aj ultrazvukový senzor.
P0 5x neopixel RGB LED P1 servo 1 P2 servo 2 P3 voľné P4 voľné P8 ultrazvukový senzor Trigger P10 ultrazvukový senzor Echo
P15 ľavý senzor čiary P16 pravý senzor čiary P19 i2c zbernica SCL P20 i2c zbernica SDA
Základné programy
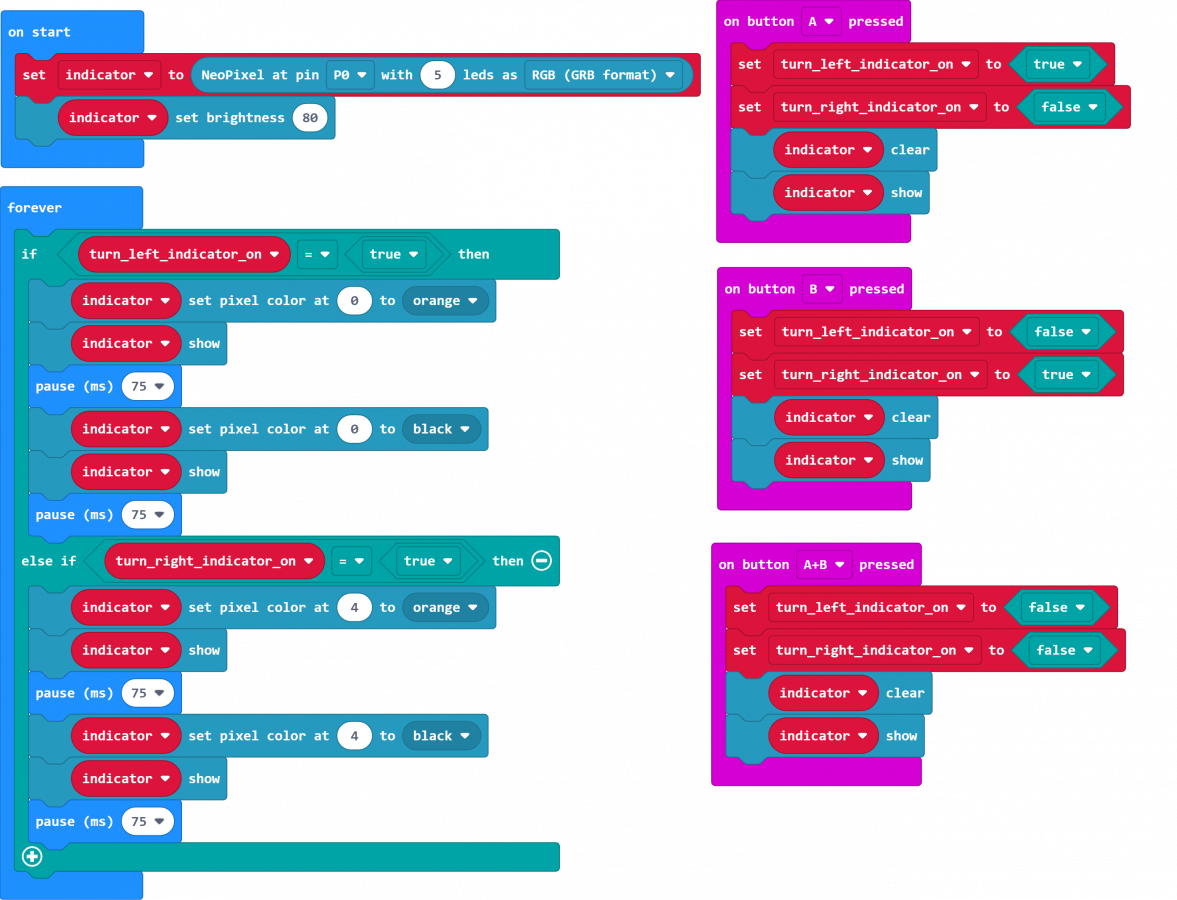
Blinker
Pre prácu so svetielkami na hornej hrane robota je potrebné nahrať knižnicu Neopixel
Jednoduchý program pre blinker, funguje na tlačítka - stlačením ľavého tlačidla 🅰 sa zapne ľavá smerovka, pravým tlačidlom 🅱 sa zapne pravá. Stlačením oboch 🅰+🅱 sa blinker vypne.
-
 Smerovky
Smerovky

input.onButtonPressed(Button.A, function () {
turn_left_indicator_on = true
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.AB, function () {
turn_left_indicator_on = false
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.B, function () {
turn_left_indicator_on = false
turn_right_indicator_on = true
indicator.clear()
indicator.show()
})
let turn_right_indicator_on = false
let turn_left_indicator_on = false
let indicator: neopixel.Strip = null
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.setBrightness(80)
basic.forever(function () {
if (turn_left_indicator_on == true) {
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
} else if (turn_right_indicator_on == true) {
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
}
})
def on_button_pressed_a():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = True
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.A, on_button_pressed_a)
def on_button_pressed_ab():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.AB, on_button_pressed_ab)
def on_button_pressed_b():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = True
indicator.clear()
indicator.show()
input.on_button_pressed(Button.B, on_button_pressed_b)
turn_right_indicator_on = False
turn_left_indicator_on = False
indicator: neopixel.Strip = None
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.set_brightness(80)
def on_forever():
if turn_left_indicator_on == True:
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
elif turn_right_indicator_on == True:
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
basic.forever(on_forever)
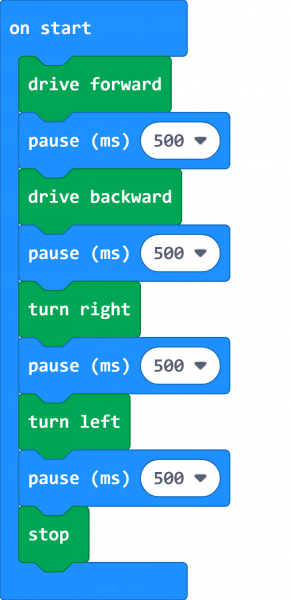
Základné pohyby
Výrobca, firma Kitronik poskytuje pre robota špeciálnu knižnicu. Niekedy sa volá iba Kitronik, ale väčšinou ju nájdete pod názvom Servo:Lite
Tento ukážkový program len pohýbe všetkými smermi a potom skončí.
-
 Základné pohyby
Základné pohyby

kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
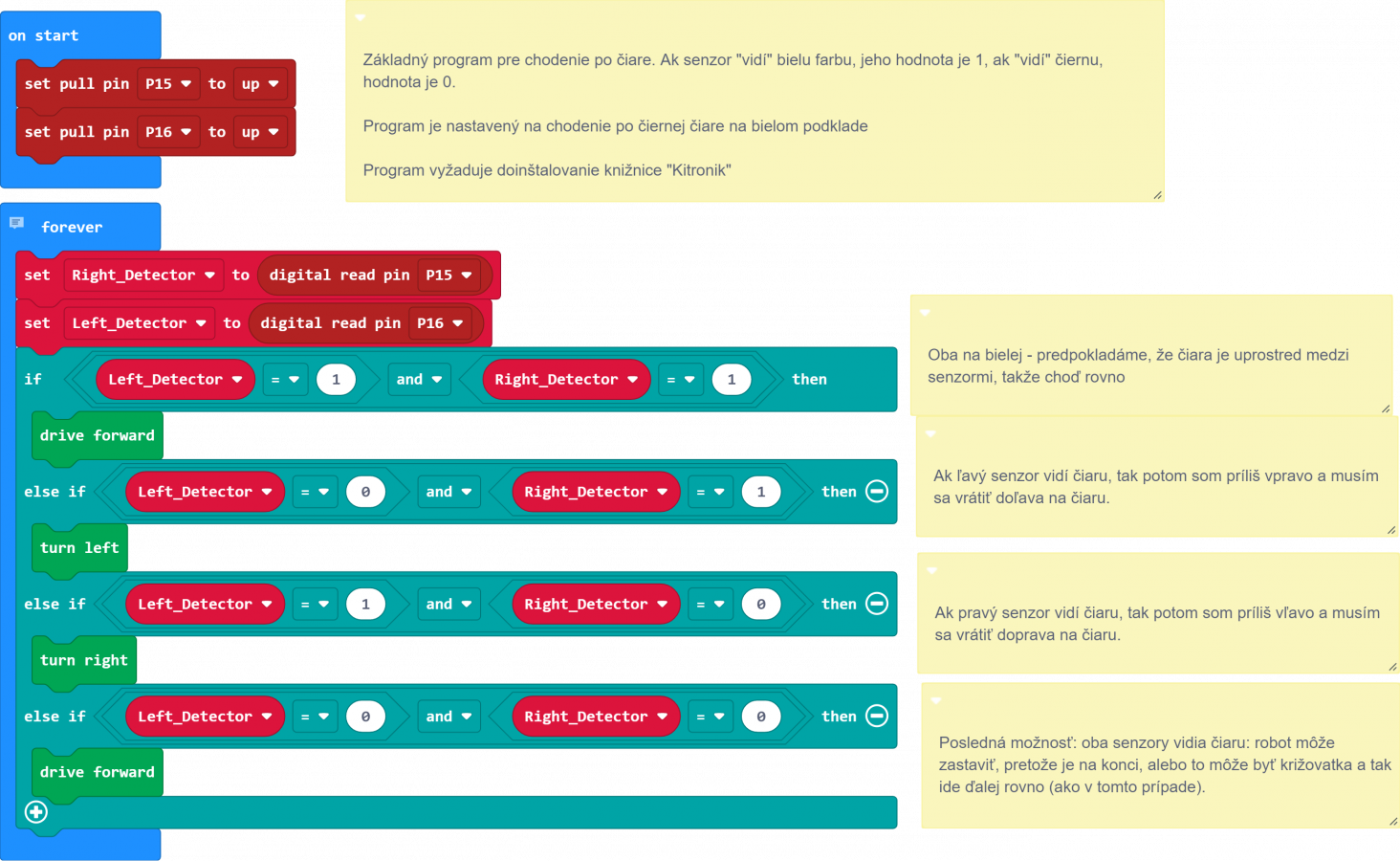
Line following robot
Robot musí byť doplnený špeciálnym senzorom, ktorý sa pripojí k expanznej doske, umožňujúcej využiť aj viac ako 3 vstupy P0 - P3.
Samozrejmosťou je tiež vopred nahrať knižnicu Kitronik
- Product page https://kitronik.co.uk/products/5659-line-following-add-on-for-move-mini-v2
- Product manual https://resources.kitronik.co.uk/pdf/5629-move-line-following-board-microbit-datasheet.pdf
-
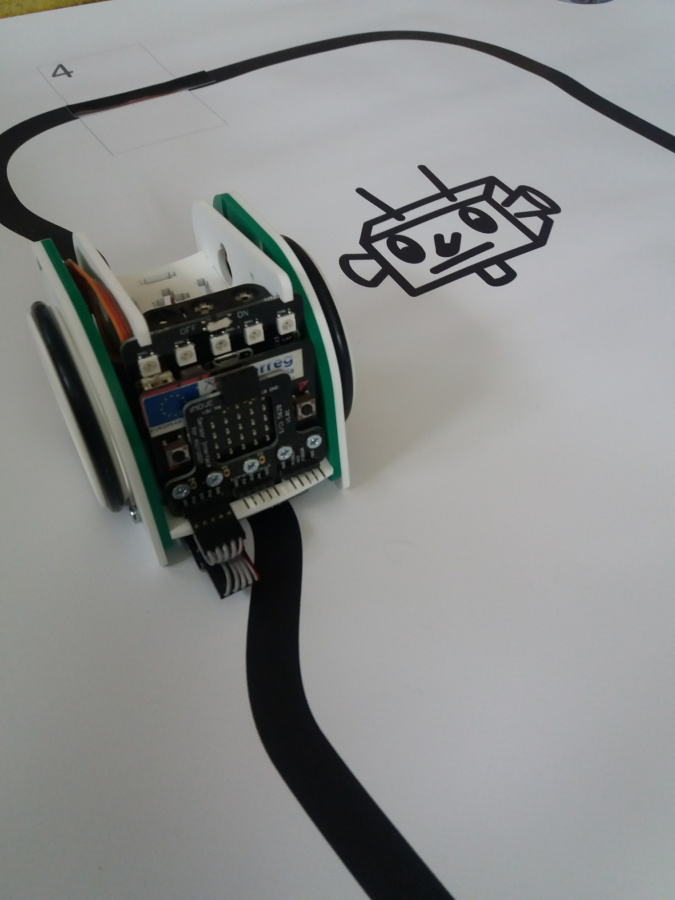 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade. -
 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade.


let Left_Detector = 0
let Right_Detector = 0
pins.setPull(DigitalPin.P15, PinPullMode.PullUp)
pins.setPull(DigitalPin.P16, PinPullMode.PullUp)
basic.forever(function on_forever() {
Right_Detector = pins.digitalReadPin(DigitalPin.P15)
Left_Detector = pins.digitalReadPin(DigitalPin.P16)
if (Left_Detector == 1 && Right_Detector == 1) {
kitronik.forward()
} else if (Left_Detector == 0 && Right_Detector == 1) {
kitronik.left()
} else if (Left_Detector == 1 && Right_Detector == 0) {
kitronik.right()
} else if (Left_Detector == 0 && Right_Detector == 0) {
kitronik.forward()
}
})
Left_Detector = 0
Right_Detector = 0
pins.set_pull(DigitalPin.P15, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P16, PinPullMode.PULL_UP)
def on_forever():
global Right_Detector, Left_Detector
Right_Detector = pins.digital_read_pin(DigitalPin.P15)
Left_Detector = pins.digital_read_pin(DigitalPin.P16)
if Left_Detector == 1 and Right_Detector == 1:
kitronik.forward()
elif Left_Detector == 0 and Right_Detector == 1:
kitronik.left()
elif Left_Detector == 1 and Right_Detector == 0:
kitronik.right()
elif Left_Detector == 0 and Right_Detector == 0:
kitronik.forward()
basic.forever(on_forever)
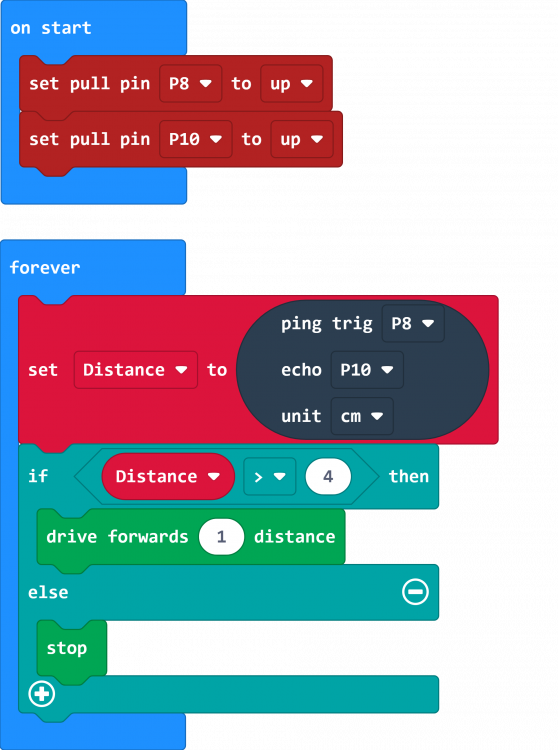
Ultrazvukový senzor
Pre prácu s ultrazvukovým senzorom je potrebné nahrať knižnicu Sonar
Jednoduchý program, ktorý ukáže ako robot zastaví pred prekážkou
-
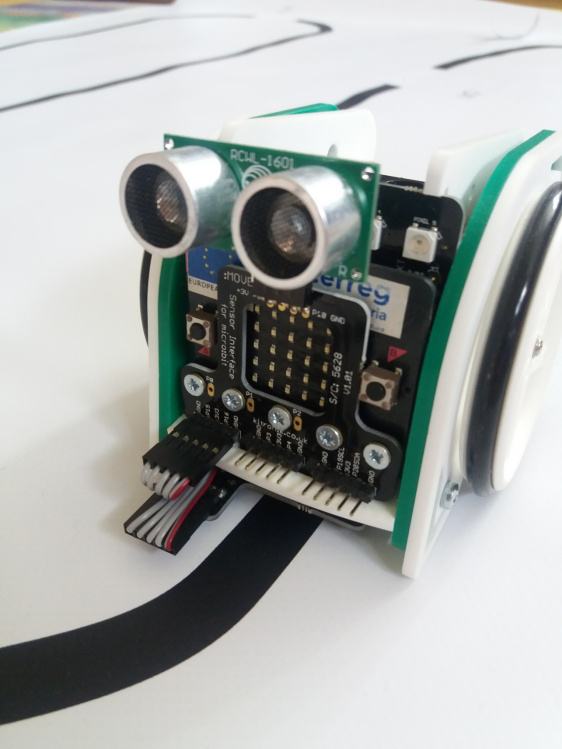 Robot s namontovaným snímačom.
Robot s namontovaným snímačom. -
 Stoj, prekážka.
Stoj, prekážka.


let Distance = 0
pins.setPull(DigitalPin.P8, PinPullMode.PullUp)
pins.setPull(DigitalPin.P10, PinPullMode.PullUp)
basic.forever(function () {
Distance = sonar.ping(
DigitalPin.P8,
DigitalPin.P10,
PingUnit.Centimeters
)
if (Distance > 4) {
kitronik_servo_lite.driveForwards(1)
} else {
kitronik_servo_lite.stop()
}
})
Distance = 0
pins.set_pull(DigitalPin.P8, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P10, PinPullMode.PULL_UP)
def on_forever():
global Distance
Distance = sonar.ping(DigitalPin.P8, DigitalPin.P10, PingUnit.CENTIMETERS)
if Distance > 4:
kitronik_servo_lite.drive_forwards(1)
else:
kitronik_servo_lite.stop()
basic.forever(on_forever)
👉 Späť na zoznam príkladov....