Kitronik :MOVE mini MK2: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| Riadok 1: | Riadok 1: | ||
Druhá, vylepšená verzia :MOVE od firmy Kitronik. | Druhá, vylepšená verzia :MOVE od firmy Kitronik. Dodáva sa v rozloženom stave, po zložení sa už nepredpokladá prerábanie. | ||
Verzia z 13:28, 20. január 2022
Druhá, vylepšená verzia :MOVE od firmy Kitronik. Dodáva sa v rozloženom stave, po zložení sa už nepredpokladá prerábanie.

Kitronik :MOVE mk2.
- Product page https://kitronik.co.uk/products/5652-move-mini-mk2-buggy-kit-excl-microbit
- Aplikácia na ovládanie cez mobil (Android): https://play.google.com/store/apps/details?id=com.kitronik.blemove&gl=SK
Základné programy
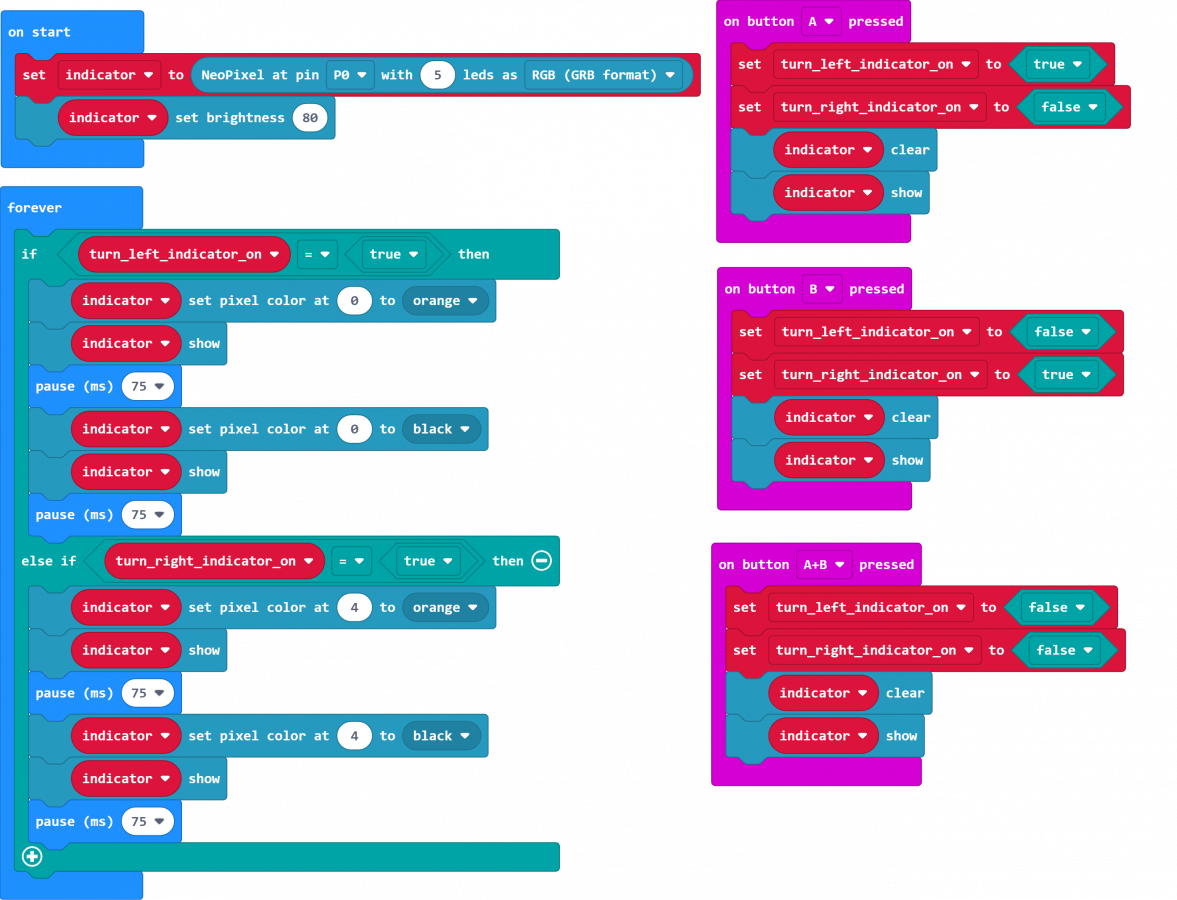
Blinker
Pre prácu so svetielkami na hornej hrane robota je potrebné nahrať knižnicu Neopixel
Jednoduchý program pre blinker, funguje na tlačítka - stlačením ľavého tlačidla 🅰 sa zapne ľavá smerovka, pravým tlačidlom 🅱 sa zapne pravá. Stlačením oboch 🅰+🅱 sa blinker vypne.
-
 Smerovky
Smerovky

input.onButtonPressed(Button.A, function () {
turn_left_indicator_on = true
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.AB, function () {
turn_left_indicator_on = false
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.B, function () {
turn_left_indicator_on = false
turn_right_indicator_on = true
indicator.clear()
indicator.show()
})
let turn_right_indicator_on = false
let turn_left_indicator_on = false
let indicator: neopixel.Strip = null
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.setBrightness(80)
basic.forever(function () {
if (turn_left_indicator_on == true) {
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
} else if (turn_right_indicator_on == true) {
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
}
})
def on_button_pressed_a():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = True
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.A, on_button_pressed_a)
def on_button_pressed_ab():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.AB, on_button_pressed_ab)
def on_button_pressed_b():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = True
indicator.clear()
indicator.show()
input.on_button_pressed(Button.B, on_button_pressed_b)
turn_right_indicator_on = False
turn_left_indicator_on = False
indicator: neopixel.Strip = None
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.set_brightness(80)
def on_forever():
if turn_left_indicator_on == True:
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
elif turn_right_indicator_on == True:
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
basic.forever(on_forever)
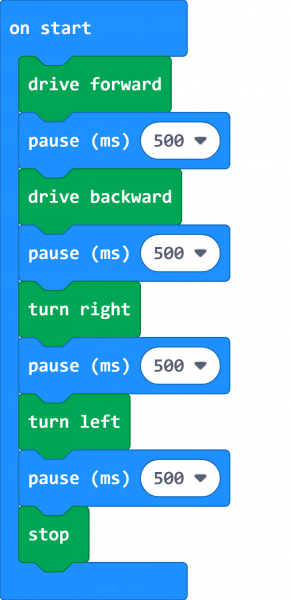
Základné pohyby
Výrobca, firma Kitronik poskytuje pre robota špeciálnu knižnicu. Niekedy sa volá iba Kitronik, ale väčšinou ju nájdete pod názvom Servo:Lite
Tento ukážkový program len pohýbe všetkými smermi a potom skončí.
-
 Základné pohyby
Základné pohyby

kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
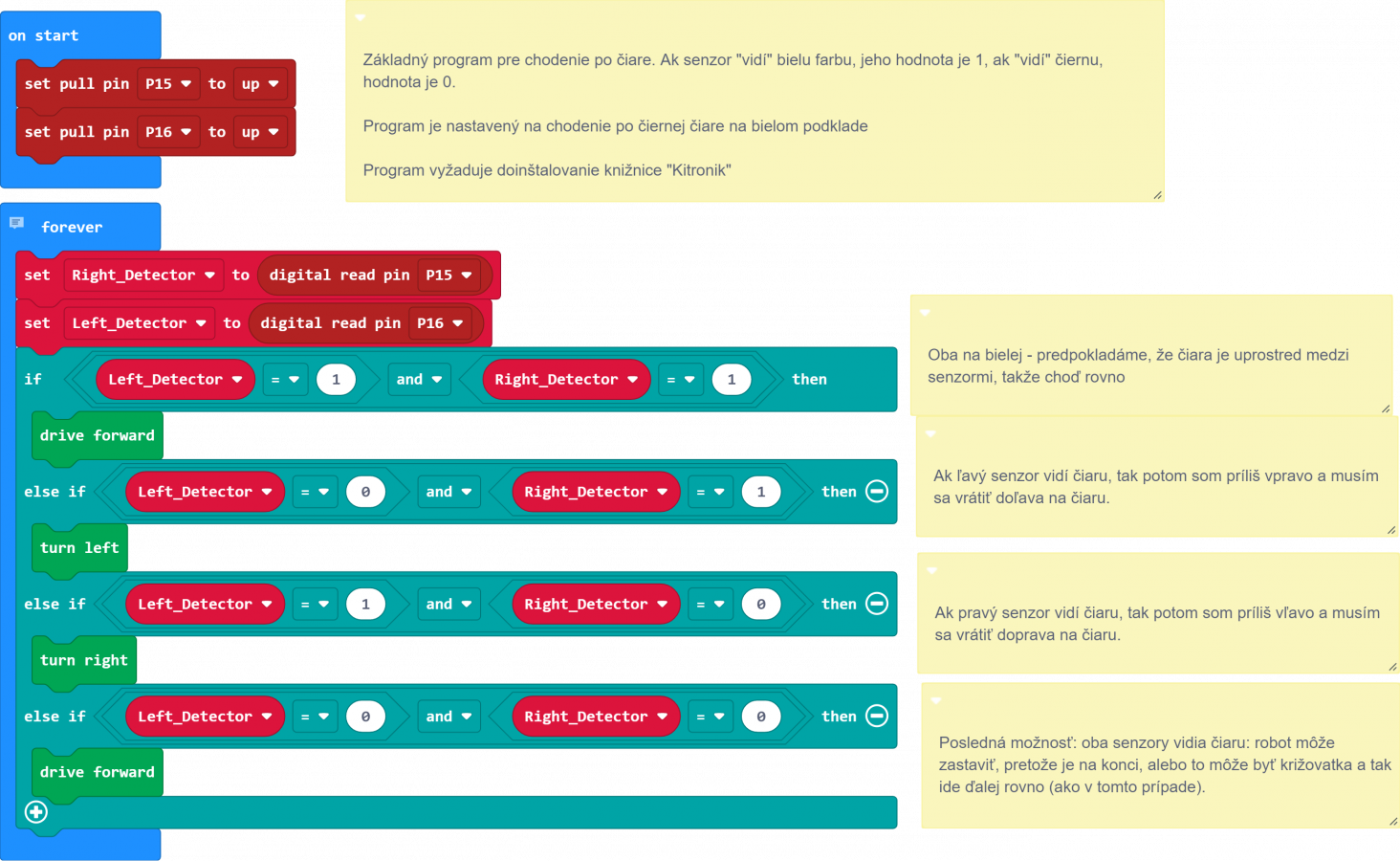
Line following robot
Robot musí byť doplnený špeciálnym senzorom, ktorý sa pripojí k expanznej doske, umožňujúcej využiť aj viac ako 3 vstupy P0 - P3.
Samozrejmosťou je tiež vopred nahrať knižnicu Kitronik
- Product page https://kitronik.co.uk/products/5659-line-following-add-on-for-move-mini-v2
- Product manual https://resources.kitronik.co.uk/pdf/5629-move-line-following-board-microbit-datasheet.pdf
-
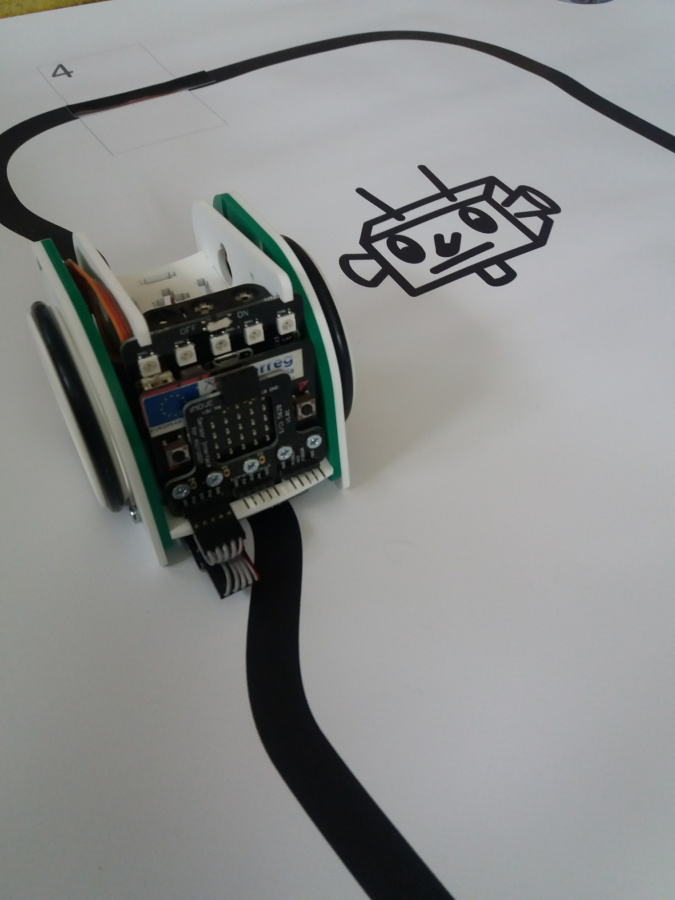 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade. -
 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade.


let Left_Detector = 0
let Right_Detector = 0
pins.setPull(DigitalPin.P15, PinPullMode.PullUp)
pins.setPull(DigitalPin.P16, PinPullMode.PullUp)
basic.forever(function on_forever() {
Right_Detector = pins.digitalReadPin(DigitalPin.P15)
Left_Detector = pins.digitalReadPin(DigitalPin.P16)
if (Left_Detector == 1 && Right_Detector == 1) {
kitronik.forward()
} else if (Left_Detector == 0 && Right_Detector == 1) {
kitronik.left()
} else if (Left_Detector == 1 && Right_Detector == 0) {
kitronik.right()
} else if (Left_Detector == 0 && Right_Detector == 0) {
kitronik.forward()
}
})
Left_Detector = 0
Right_Detector = 0
pins.set_pull(DigitalPin.P15, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P16, PinPullMode.PULL_UP)
def on_forever():
global Right_Detector, Left_Detector
Right_Detector = pins.digital_read_pin(DigitalPin.P15)
Left_Detector = pins.digital_read_pin(DigitalPin.P16)
if Left_Detector == 1 and Right_Detector == 1:
kitronik.forward()
elif Left_Detector == 0 and Right_Detector == 1:
kitronik.left()
elif Left_Detector == 1 and Right_Detector == 0:
kitronik.right()
elif Left_Detector == 0 and Right_Detector == 0:
kitronik.forward()
basic.forever(on_forever)
Ultrazvukový senzor
Pre prácu s ultrazvukovým senzorom je potrebné nahrať knižnicu Sonar
Jednoduchý program, ktorý ukáže ako robot zastaví pred prekážkou
-
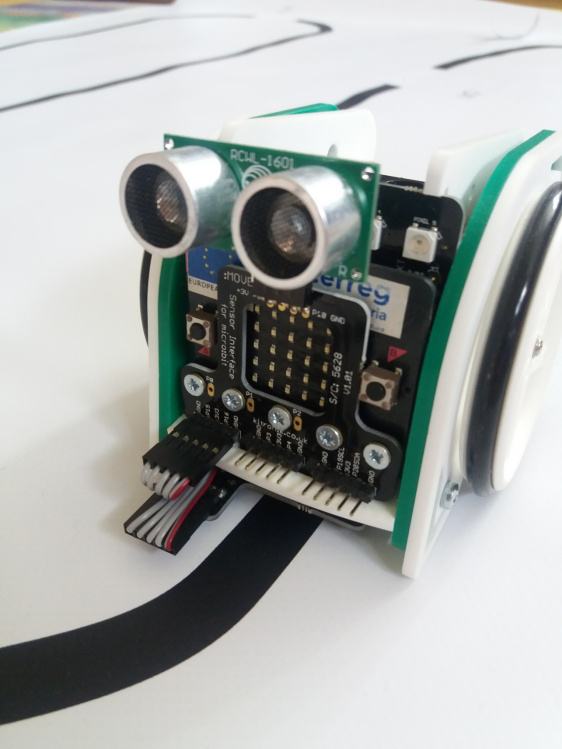 Robot s namontovaným snímačom.
Robot s namontovaným snímačom. -
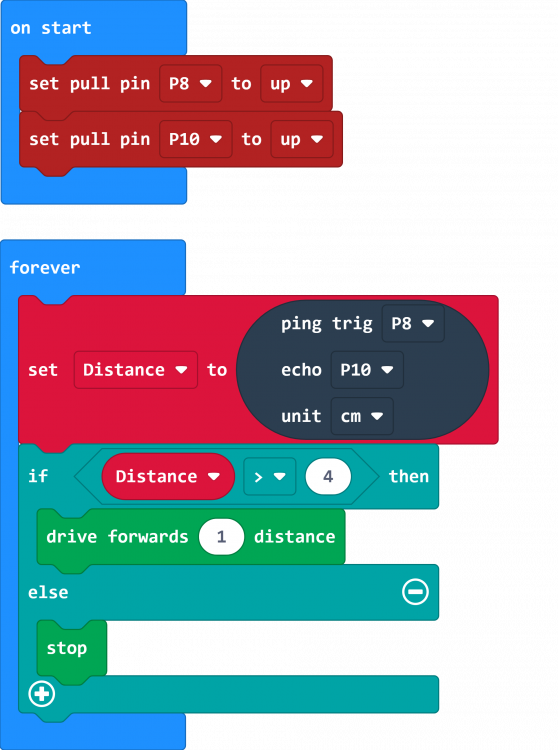 Stoj, prekážka.
Stoj, prekážka.


let Distance = 0
pins.setPull(DigitalPin.P8, PinPullMode.PullUp)
pins.setPull(DigitalPin.P10, PinPullMode.PullUp)
basic.forever(function () {
Distance = sonar.ping(
DigitalPin.P8,
DigitalPin.P10,
PingUnit.Centimeters
)
if (Distance > 4) {
kitronik_servo_lite.driveForwards(1)
} else {
kitronik_servo_lite.stop()
}
})
Distance = 0
pins.set_pull(DigitalPin.P8, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P10, PinPullMode.PULL_UP)
def on_forever():
global Distance
Distance = sonar.ping(DigitalPin.P8, DigitalPin.P10, PingUnit.CENTIMETERS)
if Distance > 4:
kitronik_servo_lite.drive_forwards(1)
else:
kitronik_servo_lite.stop()
basic.forever(on_forever)
👉 Späť na zoznam príkladov....