Acrob technical description: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| Riadok 15: | Riadok 15: | ||
Obrázok:AcrobBoard.png|''The Board'' | Obrázok:AcrobBoard.png|''The Board'' | ||
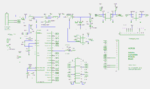
Obrázok:AcrobSchematic_Low.png|''[[Médiá:AcrobSchematic.pdf|schematic diagram]]'' | Obrázok:AcrobSchematic_Low.png|''[[Médiá:AcrobSchematic.pdf|schematic diagram]]'' | ||
Obrázok: | Obrázok:Connectors.png|''[[Acrob connectors|Connectors]] '' | ||
Obrázok:AcrobPcb_A.png|''pcb A'' | Obrázok:AcrobPcb_A.png|''pcb A'' | ||
Obrázok:AcrobPcb_B.png|''pcb B'' | Obrázok:AcrobPcb_B.png|''pcb B'' | ||
Verzia z 12:39, 23. marec 2012
Documentation

- Schematic diagram
- List of components
- The board description
- Connectors, pinouts, jumpers
- Resources
-
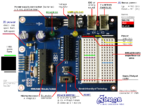 The Board
The Board -
-

-
 pcb A
pcb A -
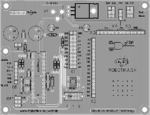 pcb B
pcb B -
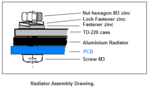 radiator mech
radiator mech





Information and Links
- Arduino
- Language Reference
- Robotics with Boe-Bot Robot (BasicStamp)
Components
- ATmega328 Description + Datasheet
- FTDI Basic Breakout board
- LM2940-5.0 Description + Datasheet
Tips and troubleshooting
- Note: configuring Reset in Windows - http://www.arduino.cc/en/Guide/ArduinoPro
