CADRS Cvičenie 12: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| (6 medziľahlých úprav od 2 ďalších používateľov nie je zobrazených) | |||
| Riadok 5: | Riadok 5: | ||
Literatúra: | Literatúra: | ||
* ... | * [http://en.wikipedia.org/wiki/PID_controller PID controller @ Wikipedia] | ||
* [http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/Design/Perf1SSE.htm Steady State Error In Control Systems] | |||
* [http://www.engin.umich.edu/group/ctm/PID/PID.html PID Tutorial for Matlab] | |||
* Tim Wescott: ''[http://www.embedded.com/2000/0010/0010feat3.htm PID Without a PhD]'' (embedded.com) | |||
| Riadok 13: | Riadok 16: | ||
# | == Úlohy == | ||
# Začnite s programom na meranie A/D kanálu s periódou 100ms z predošlého cvičenia - doplňte ho o ovládanie výstupu PWM a zmerajte prechodovú charakteristiku vašej sústavy. Určte zosilnenie a časovú konštantu. Je to skutočne sústava prvého rádu? Zaznamenajte grafické priebehy. | |||
# Navrhnite k sústave P-regulátor (nezabudnite na m_0!). Vhodne ošetrite rozsahy a limitáciu. | |||
# Podľa možnosti sa vyhnite používaniu reálnych čísel s pohyblivou rádovou čiarkou (float). Namiesto toho použite "trik" z prednášky: napr. napätie 2.5 V bude mať reprezentáciu celočíselnú v tvare 25. Nezabudnite premyslieť, či vám rozsahy premenných umožnia pracovať aj so zápornými číslami. | |||
# Program doplňte o možnosť meniť skokom želanú hodnotu (napr. S1 zvýši, S2 zníži w o 10%). | |||
# Zmerajte a zaznamenajte odozvu regulátora na skokové zmeny želanej hodnoty a demonštrujte tak jeho správnu funkciu. Ak bude možné, demonštrujte funkciu regulátora aj pri zmene záťaže. | |||
# Všetky dosiahnuté výsledky zdokumentujte a dokladujte. Je potrebné odovzdať (na papieri aj elektronicky) správu z projektu, ktorá bude obsahovať popis problému, sústavu aj s identifikáciou, zaznamenanými priebehmi prechodovej charakteristiky, ďalej všetky výpočty týkajúce sa identifikácie sústavy a návrhu regulátora ako aj jeho implementácie - výpočty parametrov pre PWM, deliace pomery a všetky dôležité parametre použité vo vašom programe. Okrem výpisu KOMENTOVANÉHO zdrojového textu má vaša práca obsahovať aj namerané priebehy z regulačného procesu a napokon ako prílohu zdrojové texty a všetky data v elektronickej podobe. Za vypracovaný referát dostanete max. 10 bodov, pričom hodnotiť sa bude (všetko cca 1 bod): | |||
* Prechodová charakteristika, | |||
* Identifikácia sústavy, | |||
* Výpočty, | |||
* Návrh regulátora, | |||
* Výpočet teoretickej trvalej regulačnej odchylky, | |||
* Implementácia regulátora podložená výpočtami, | |||
* Funkcia regulátora, | |||
* Funkcia a komfort programu, | |||
* Vypracovanie grafov, tabuliek a pod. | |||
* Celkový vzhľad správy | |||
Správu môžete vypracovať aj on-line v tomto Wiki systéme, Username je Student, bez hesla. | |||
Ak máte chuť, vyjadrite svoj názor v [[CADRS Anketa|Ankete]] | |||
Aktuálna revízia z 20:44, 10. december 2008

Finále
Literatúra:
- PID controller @ Wikipedia
- Steady State Error In Control Systems
- PID Tutorial for Matlab
- Tim Wescott: PID Without a PhD (embedded.com)
Rekapitulácia
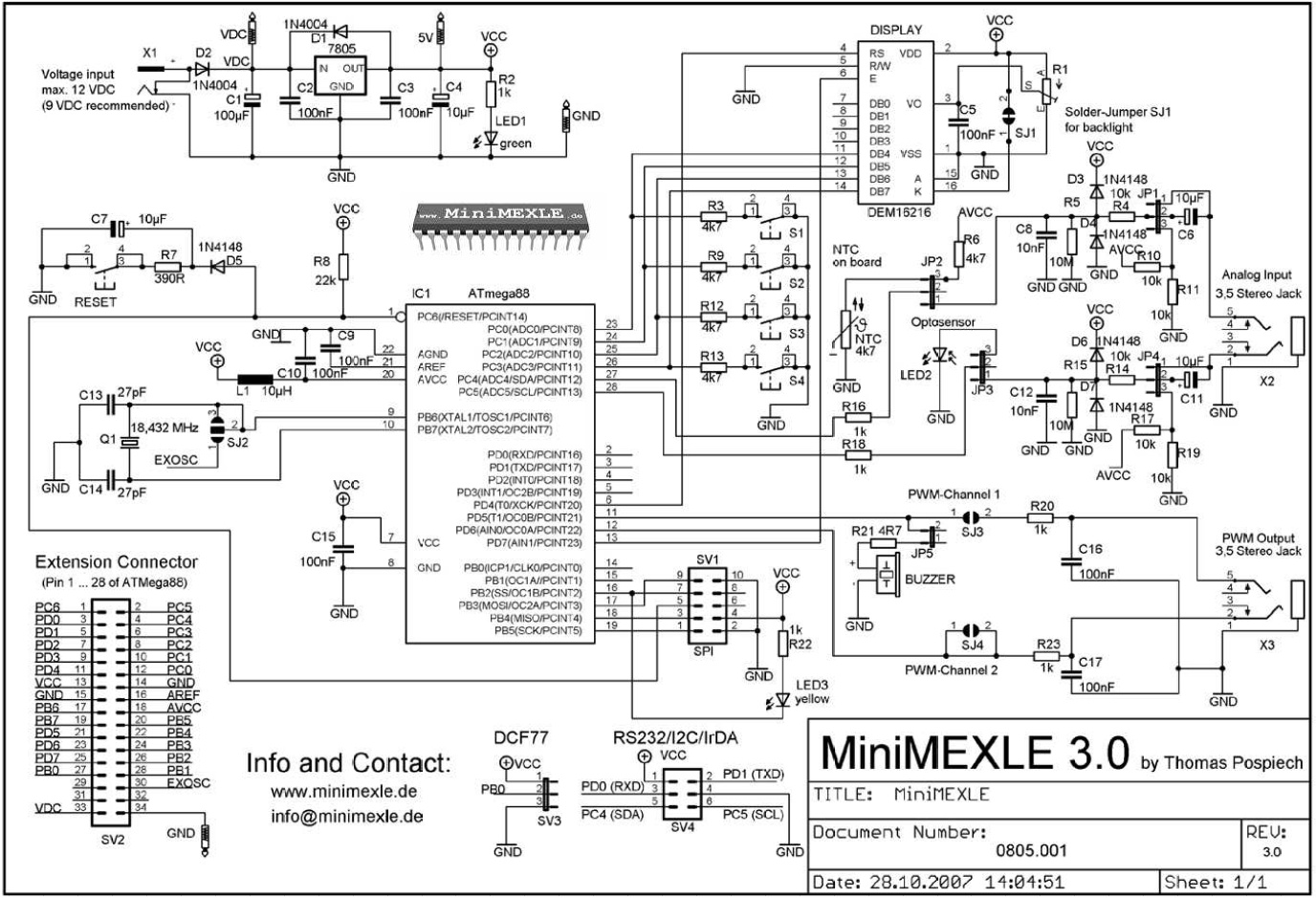
Máte k dispozícii vývojovú dosku MiniMEXLE (popis,schéma zapojenia) a s procesorom ATmega88 (datasheet) a prípadne aj testovací program mexletest2.hex.
{kind=link}
Úlohy
- Začnite s programom na meranie A/D kanálu s periódou 100ms z predošlého cvičenia - doplňte ho o ovládanie výstupu PWM a zmerajte prechodovú charakteristiku vašej sústavy. Určte zosilnenie a časovú konštantu. Je to skutočne sústava prvého rádu? Zaznamenajte grafické priebehy.
- Navrhnite k sústave P-regulátor (nezabudnite na m_0!). Vhodne ošetrite rozsahy a limitáciu.
- Podľa možnosti sa vyhnite používaniu reálnych čísel s pohyblivou rádovou čiarkou (float). Namiesto toho použite "trik" z prednášky: napr. napätie 2.5 V bude mať reprezentáciu celočíselnú v tvare 25. Nezabudnite premyslieť, či vám rozsahy premenných umožnia pracovať aj so zápornými číslami.
- Program doplňte o možnosť meniť skokom želanú hodnotu (napr. S1 zvýši, S2 zníži w o 10%).
- Zmerajte a zaznamenajte odozvu regulátora na skokové zmeny želanej hodnoty a demonštrujte tak jeho správnu funkciu. Ak bude možné, demonštrujte funkciu regulátora aj pri zmene záťaže.
- Všetky dosiahnuté výsledky zdokumentujte a dokladujte. Je potrebné odovzdať (na papieri aj elektronicky) správu z projektu, ktorá bude obsahovať popis problému, sústavu aj s identifikáciou, zaznamenanými priebehmi prechodovej charakteristiky, ďalej všetky výpočty týkajúce sa identifikácie sústavy a návrhu regulátora ako aj jeho implementácie - výpočty parametrov pre PWM, deliace pomery a všetky dôležité parametre použité vo vašom programe. Okrem výpisu KOMENTOVANÉHO zdrojového textu má vaša práca obsahovať aj namerané priebehy z regulačného procesu a napokon ako prílohu zdrojové texty a všetky data v elektronickej podobe. Za vypracovaný referát dostanete max. 10 bodov, pričom hodnotiť sa bude (všetko cca 1 bod):
- Prechodová charakteristika,
- Identifikácia sústavy,
- Výpočty,
- Návrh regulátora,
- Výpočet teoretickej trvalej regulačnej odchylky,
- Implementácia regulátora podložená výpočtami,
- Funkcia regulátora,
- Funkcia a komfort programu,
- Vypracovanie grafov, tabuliek a pod.
- Celkový vzhľad správy
Správu môžete vypracovať aj on-line v tomto Wiki systéme, Username je Student, bez hesla.
Ak máte chuť, vyjadrite svoj názor v Ankete