Elecfreaks ring:bit Car
Zo stránky SensorWiki
Robot ring:bot Car od firmy Elecfreaks.

Elecfreaks ring:bit Car v2
- Product page https://www.elecfreaks.com/ring-bit-car-v2-for-micro-bit.html
- Príslušenstvo
- Manual https://www.elecfreaks.com/learn-en/microbitKit/ring_bit_v2/index.html
- RLX (ceny k 20.1.2022)
- ring:bit v2 + micro:bit v2 47,88 € s DPH
- ring:bit v2 bez micro:bitu 23,00 € s DPH
- príslušenstvo: ultrazvukový senzor, sledovanie čiary a LED pásik 17,40 € s DPH
- príslušenstvo: len sledovanie čiary 7,08 € s DPH
- náhradný diel: riadiaca doska 6,73 € s DPH
- Návod v slovenčine https://www.nextech.sk/a/Konstrukcia-a-programovanie-robotov-3--E2-80-93-podvozok-Ring-bit-pre-Micro-bit
Technické parametre
- Napájanie 3,5 - 5,0 V DC ( 3x AAA 1,5 V batéria)
- Vstupy a senzory
- 2x infračervený detektor (na čiary) s roztečou 1,5 cm
- 1x ultrazvukový senzor SR04, SR04P (5V interface? odmeraj)
- P0, P1, P2
- Výstupy a aktory
- 2x modifikovaný servomotor EF90D
- 2x RGB LED Neopixel zo spodnej strany (s príslušenstvom Light Bar + ďalších 8
- Rozmery: 88 x 80 x 80 mm (bez príslušenstva)
- Hmotnosť: 120 g (bez/s batériami)
Priradenie vstupov a výstupov
P0 rozširujúce moduly (nedajú sa používať súčasne viaceré) P1 ľavý motor P2 pravý motor
Základné programy
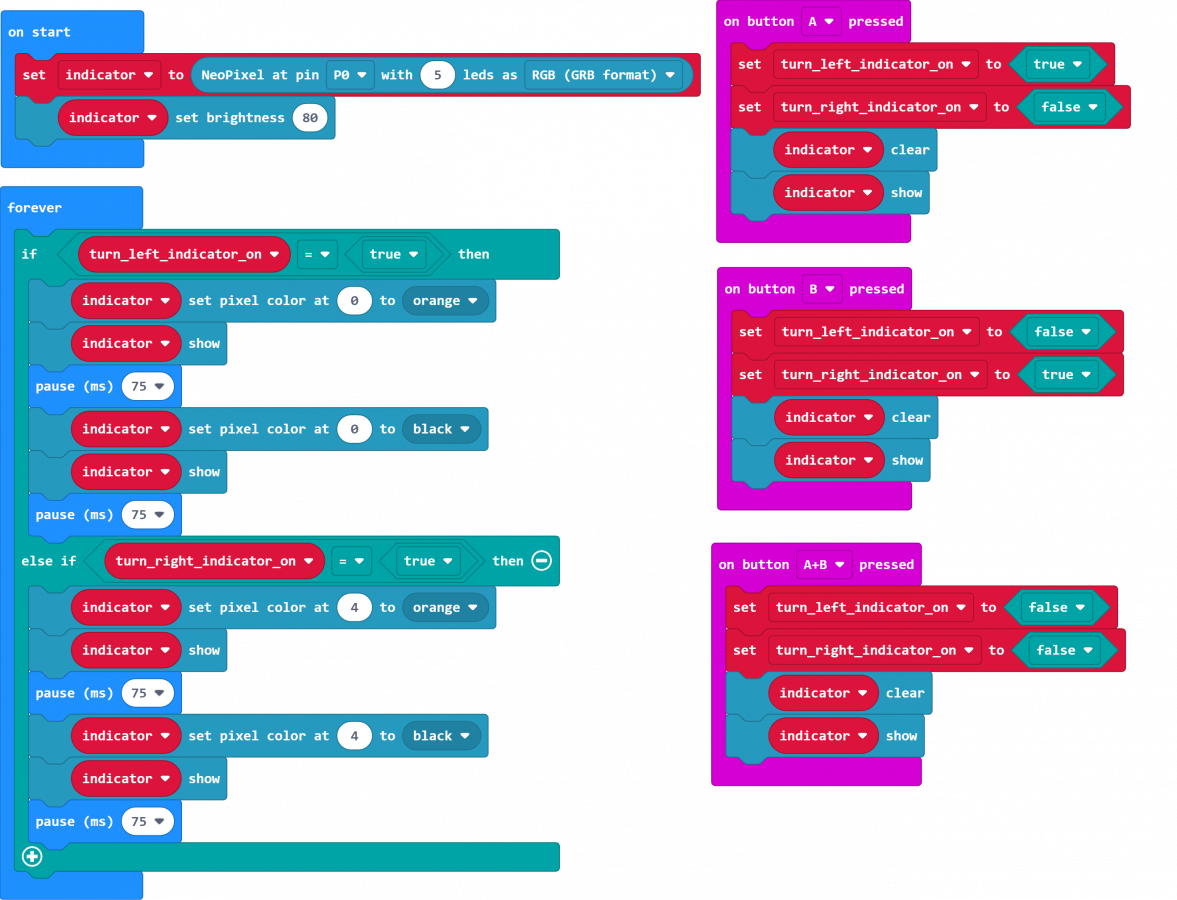
Blinker
Pre prácu so svetielkami na hornej hrane robota je potrebné nahrať knižnicu Neopixel
Jednoduchý program pre blinker, funguje na tlačítka - stlačením ľavého tlačidla 🅰 sa zapne ľavá smerovka, pravým tlačidlom 🅱 sa zapne pravá. Stlačením oboch 🅰+🅱 sa blinker vypne.
-
 Smerovky
Smerovky

input.onButtonPressed(Button.A, function () {
turn_left_indicator_on = true
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.AB, function () {
turn_left_indicator_on = false
turn_right_indicator_on = false
indicator.clear()
indicator.show()
})
input.onButtonPressed(Button.B, function () {
turn_left_indicator_on = false
turn_right_indicator_on = true
indicator.clear()
indicator.show()
})
let turn_right_indicator_on = false
let turn_left_indicator_on = false
let indicator: neopixel.Strip = null
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.setBrightness(80)
basic.forever(function () {
if (turn_left_indicator_on == true) {
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(0, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
} else if (turn_right_indicator_on == true) {
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Orange))
indicator.show()
basic.pause(75)
indicator.setPixelColor(4, neopixel.colors(NeoPixelColors.Black))
indicator.show()
basic.pause(75)
}
})
def on_button_pressed_a():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = True
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.A, on_button_pressed_a)
def on_button_pressed_ab():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = False
indicator.clear()
indicator.show()
input.on_button_pressed(Button.AB, on_button_pressed_ab)
def on_button_pressed_b():
global turn_left_indicator_on, turn_right_indicator_on
turn_left_indicator_on = False
turn_right_indicator_on = True
indicator.clear()
indicator.show()
input.on_button_pressed(Button.B, on_button_pressed_b)
turn_right_indicator_on = False
turn_left_indicator_on = False
indicator: neopixel.Strip = None
indicator = neopixel.create(DigitalPin.P0, 5, NeoPixelMode.RGB)
indicator.set_brightness(80)
def on_forever():
if turn_left_indicator_on == True:
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(0, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
elif turn_right_indicator_on == True:
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.ORANGE))
indicator.show()
basic.pause(75)
indicator.set_pixel_color(4, neopixel.colors(NeoPixelColors.BLACK))
indicator.show()
basic.pause(75)
basic.forever(on_forever)
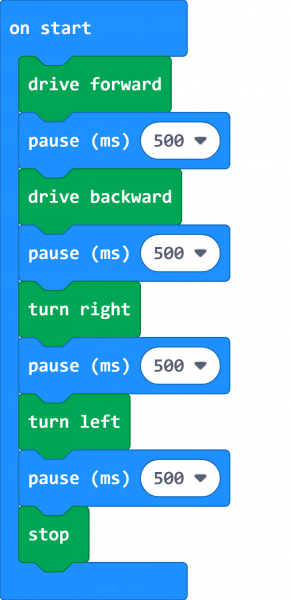
Základné pohyby
Výrobca, firma Kitronik poskytuje pre robota špeciálnu knižnicu. Niekedy sa volá iba Kitronik, ale väčšinou ju nájdete pod názvom Servo:Lite
Tento ukážkový program len pohýbe všetkými smermi a potom skončí.
-
 Základné pohyby
Základné pohyby

kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
kitronik_servo_lite.forward()
basic.pause(500)
kitronik_servo_lite.backward()
basic.pause(500)
kitronik_servo_lite.right()
basic.pause(500)
kitronik_servo_lite.left()
basic.pause(500)
kitronik_servo_lite.stop()
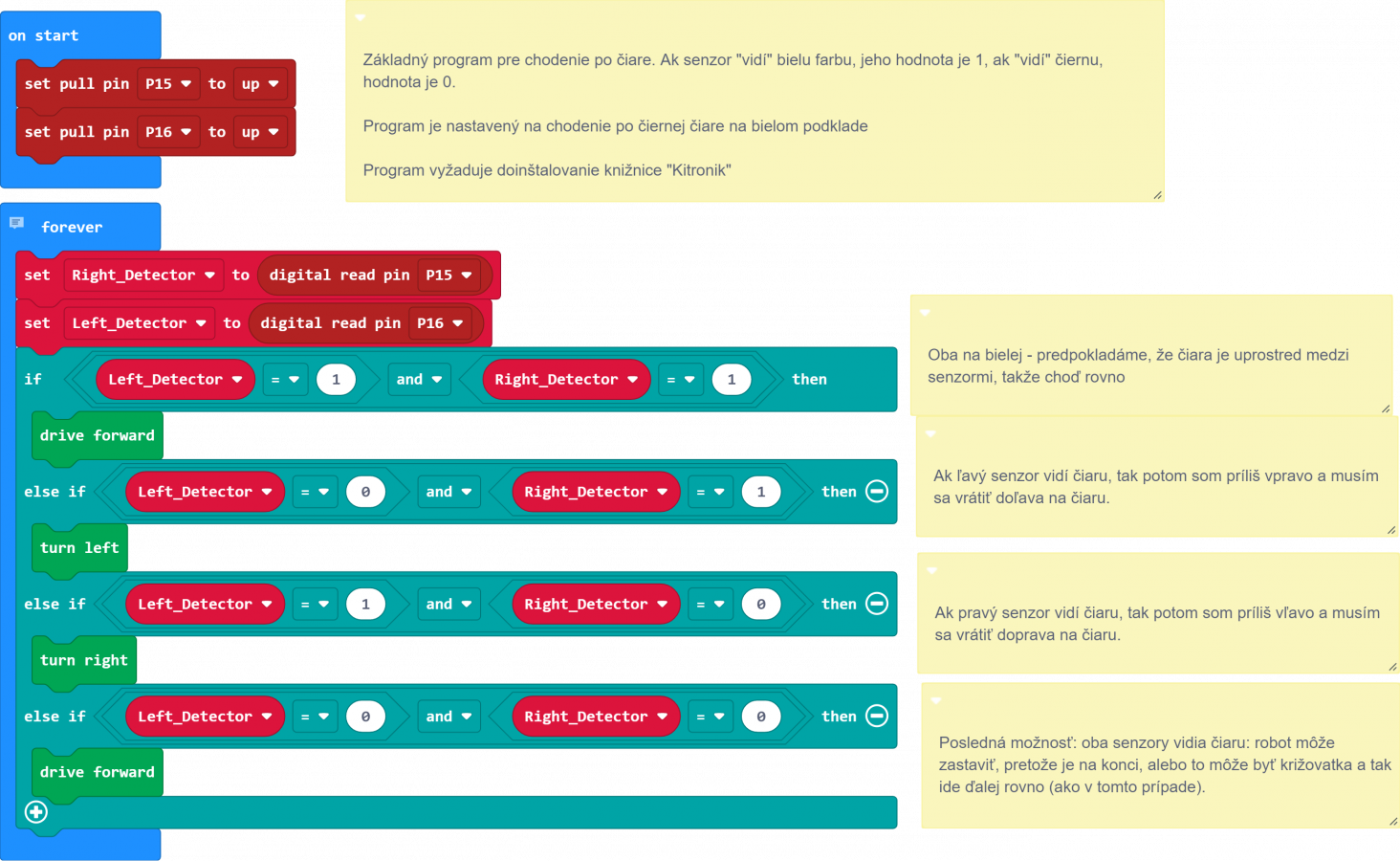
Line following robot
ring:bit ukazkovy program https://makecode.microbit.org/45086-58044-52516-35101
Robot musí byť doplnený špeciálnym senzorom, ktorý sa pripojí k expanznej doske, umožňujúcej využiť aj viac ako 3 vstupy P0 - P3.
Samozrejmosťou je tiež vopred nahrať knižnicu Kitronik
- Product page https://kitronik.co.uk/products/5659-line-following-add-on-for-move-mini-v2
- Product manual https://resources.kitronik.co.uk/pdf/5629-move-line-following-board-microbit-datasheet.pdf
-
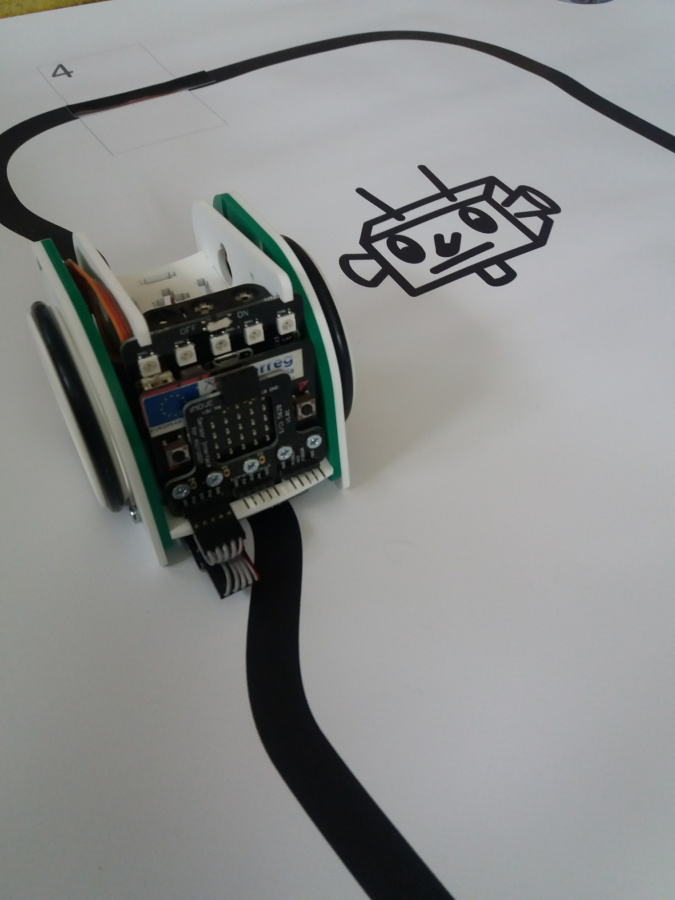 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade. -
 Robot sleduje čiernu čiaru na svetlom podklade.
Robot sleduje čiernu čiaru na svetlom podklade.


let Left_Detector = 0
let Right_Detector = 0
pins.setPull(DigitalPin.P15, PinPullMode.PullUp)
pins.setPull(DigitalPin.P16, PinPullMode.PullUp)
basic.forever(function on_forever() {
Right_Detector = pins.digitalReadPin(DigitalPin.P15)
Left_Detector = pins.digitalReadPin(DigitalPin.P16)
if (Left_Detector == 1 && Right_Detector == 1) {
kitronik.forward()
} else if (Left_Detector == 0 && Right_Detector == 1) {
kitronik.left()
} else if (Left_Detector == 1 && Right_Detector == 0) {
kitronik.right()
} else if (Left_Detector == 0 && Right_Detector == 0) {
kitronik.forward()
}
})
Left_Detector = 0
Right_Detector = 0
pins.set_pull(DigitalPin.P15, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P16, PinPullMode.PULL_UP)
def on_forever():
global Right_Detector, Left_Detector
Right_Detector = pins.digital_read_pin(DigitalPin.P15)
Left_Detector = pins.digital_read_pin(DigitalPin.P16)
if Left_Detector == 1 and Right_Detector == 1:
kitronik.forward()
elif Left_Detector == 0 and Right_Detector == 1:
kitronik.left()
elif Left_Detector == 1 and Right_Detector == 0:
kitronik.right()
elif Left_Detector == 0 and Right_Detector == 0:
kitronik.forward()
basic.forever(on_forever)
Ultrazvukový senzor
Pre prácu s ultrazvukovým senzorom je potrebné nahrať knižnicu Sonar
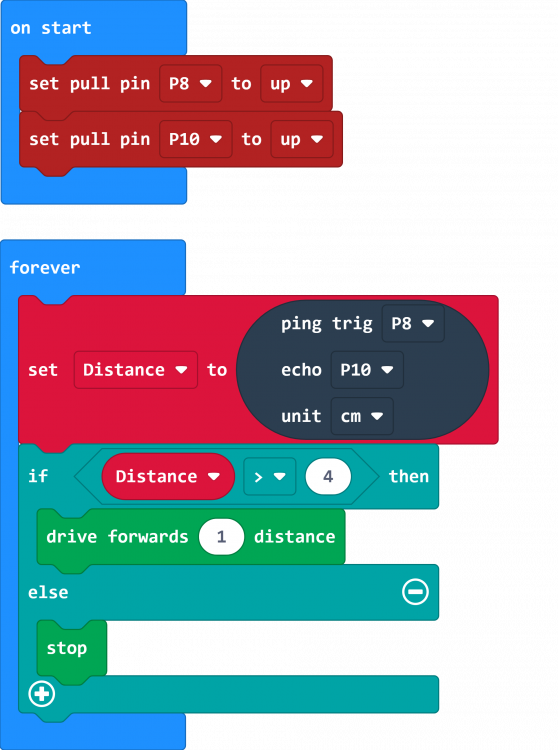
Jednoduchý program, ktorý ukáže ako robot zastaví pred prekážkou
-
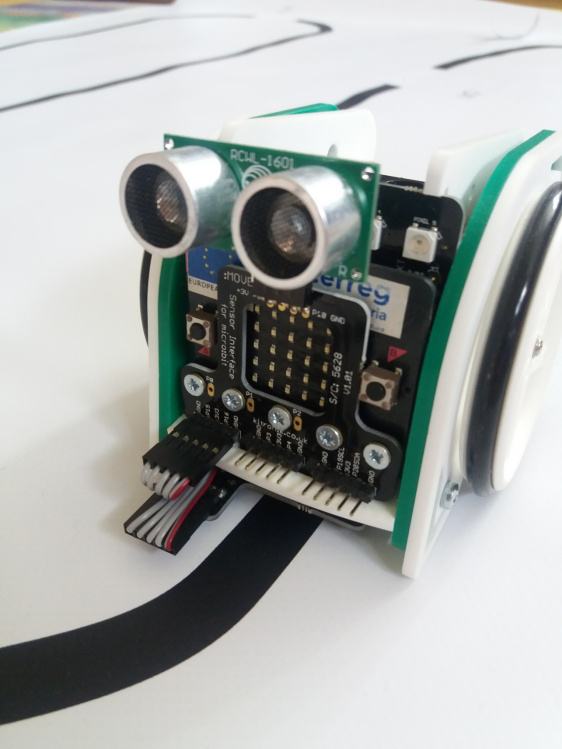 Robot s namontovaným snímačom.
Robot s namontovaným snímačom. -
 Stoj, prekážka.
Stoj, prekážka.


let Distance = 0
pins.setPull(DigitalPin.P8, PinPullMode.PullUp)
pins.setPull(DigitalPin.P10, PinPullMode.PullUp)
basic.forever(function () {
Distance = sonar.ping(
DigitalPin.P8,
DigitalPin.P10,
PingUnit.Centimeters
)
if (Distance > 4) {
kitronik_servo_lite.driveForwards(1)
} else {
kitronik_servo_lite.stop()
}
})
Distance = 0
pins.set_pull(DigitalPin.P8, PinPullMode.PULL_UP)
pins.set_pull(DigitalPin.P10, PinPullMode.PULL_UP)
def on_forever():
global Distance
Distance = sonar.ping(DigitalPin.P8, DigitalPin.P10, PingUnit.CENTIMETERS)
if Distance > 4:
kitronik_servo_lite.drive_forwards(1)
else:
kitronik_servo_lite.stop()
basic.forever(on_forever)
👉 Späť na zoznam príkladov....