Schaeffler FPGA
Zo stránky SensorWiki
Modelovanie vnoreného systému na čipe FPGA - praktická časť
Cieľom praktického cvičenia je navrhnúť hardvér a softvér pre vnorený mikropočítačový systém, využívajúci soft-core procesor MicroBlaze. Úlohou systému bude ovládať rýchlosť jednosmerného motora pomocou pulznej šírkovej modulácie (PWM) v otvorenej slučke. Procesor bude zaznamenávať signály z enkodéra motora a na základe týchto signálov vyhodnocovať uhlovú rýchlosť motora v jednotkách otáčok za minútu (ot/min).
Úlohy
- Naštudujte si funkciu H-mostíka a enkodéra DC motora
- Navrhnite hardvér procesora s perifériami.
- Navrhnite a otestujte softvér pre procesor na obsluhu PWM a enkodéra motora.
- Overte ovládanie a snímanie uhlovej rýchlosti DC motora pomocou experimentu.
Naštudujte si funkciu H-mostíka a enkodéra DC motora
H-mostík
H-mostík je elektronický obvod používaný na riadenie smeru a veľkosti prúdu, ktorý tečie cez záťaž. Pozostáva z štyroch tranzistorov a vytvára tak kruhovú sústavu, ktorá dokáže meniť polaritu prúdu prechádzajúceho cez záťaž. Táto vlastnosť umožňuje použitie H-mostíka v rôznych aplikáciách, ako napríklad pri riadení motora, serva alebo pri riadení intenzity svetla LED. H-mostíky sú kľúčovými súčasťami v mnohých robotických aplikáciách a elektrotechnických projektov, kde umožňujú presné a účinné riadenie výkonu.
Pmod DHB1 je dvojkanálový H-mostík, ktorý dokáže ovládať 2 DC motory, je pripojiteľný pomocou konektoru Pmod. Pin EN1 môže byť realizovaný ako PWM signál, pri plnej striede (Duty) sa motor bude točiť maximálnou rýchlosťou. Pomocou DIR1 sa určí smer otáčania motora. Signály S1A a S1B slúžia ako výstupy z enkodéra, pomocou ktorých bude snímať rýchlosť otáčania motora. Viac informácií o H-mostíku nájdete na stránke výrobcu
Inkrementálny enkodér DC motora
Enkodér motora je senzor, ktorý slúži na zisťovanie otáčok a polohy rotujúceho prvku motora. Enkodéry môžu byť absolútne alebo inkrementálne. Inkrementálne enkodéry merajú zmenu polohy rotujúceho prvku vzhľadom k svojej východiskovej polohy. Absolútne enkodéry dokážu zistiť aktuálnu polohu rotujúceho prvku bez ohľadu na jeho predchádzajúce polohy.
V našej aplikácií budeme využívať magnetický inkrementálny enkodér s dvoma halovými sondami. Zmenu magnetického poľa vytvára kotúč s troma magnetmi. Halova sonda tak zaznamená tri nábežné hrany na otáčku motora. Pri výpočte treba započítať aj prevodový pomer planétovej prevodovky motora, ktorý je 1:19. Hriadeľ motora za prevodovkou otáča 19x pomalšie ako motor.
- V programe Vivado otvorte projekt umiestnený v adresári C:\skolenie\VIVADO\embedded_system_design.
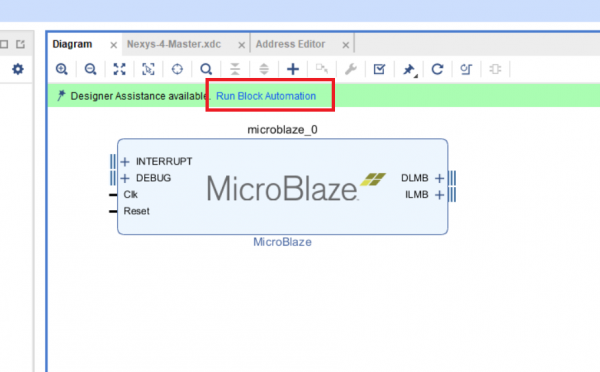
- Vytvorte základnú štruktúru procesora microblaze s prerušeniami, ktorý pripojte na hodinový a reset signál. Použite pomocný nástroj Run Block Automation a nakonfigurujte procesor


- Vytvorte hardvér pre UART komunikáciu, pripojte aj prerušenie na vstupný blok radiča prerušení.
Takto sa sem píše obyčajný text.
Takto tučný, takto kurzíva.
Linky:
- Interné: Schaeffler Modul 3A
- Externé: nRF51 Series Reference Manual (Version 3.0)
Obrázok vložíš takto:
{kind=link}
všimni si, že je nektívny a treba ho potom nahrať kliknutím na odkaz.
Takto sa vkladajú jednoduché zdrojáky:
Q <= tmp;
QBAR <= not tmp;
Alebo aj takto cez záložky ak to má viac súborov:
library ieee;
use ieee. std_logic_1164.all;
use ieee. std_logic_arith.all;
use ieee. std_logic_unsigned.all;
entity SR_FF is
PORT( S,R,CLOCK: in std_logic;
Q, QBAR: out std_logic);
end SR_FF;
Architecture behavioral of SR_FF is
begin
PROCESS(CLOCK)
variable tmp: std_logic;
begin
if(CLOCK='1' and CLOCK'EVENT) then
if(S='0' and R='0')then
tmp:=tmp;
elsif(S='1' and R='1')then
tmp:='Z';
elsif(S='0' and R='1')then
tmp:='0';
else
tmp:='1';
end if;
end if;
Q <= tmp;
QBAR <= not tmp;
end PROCESS;
end behavioral;
from microbit import *
uart.init(baudrate=115200, bits=8, parity=None, stop=1)
while True:
accX = accelerometer.get_x()
uart.write('%d\r\n' % (accX))
sleep(100)
display.set_pixel(1,1,5)
sleep(100)
display.set_pixel(1,1,0)
A takto kľučové slová