Digitálne výstupy: Rozdiel medzi revíziami
Zo stránky SensorWiki
Vytvorená stránka „== Exkurzia vo VW Slovakia == 500px == Digitálny výstup - tranzistor ako spínač == Úloha: postupujte podľa obrázkov, vždy najprv…“ |
Bez shrnutí editace |
||
| Riadok 1: | Riadok 1: | ||
== Digitálny výstup - tranzistor ako spínač == | == Digitálny výstup - tranzistor ako spínač == | ||
| Riadok 41: | Riadok 37: | ||
* ToDo | * ToDo | ||
[[Category:ELSA]] | [[Category:ELSA]] | ||
Verzia z 09:19, 12. október 2017
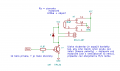
Digitálny výstup - tranzistor ako spínač
Úloha: postupujte podľa obrázkov, vždy najprv vypočítajte hodnoty súčiastok, potom zapojte obvod na skúšobnej doštičke a potom odmerajte, či ste dosiahli požadované parametre.
ToDo: este tu chyba jednoduchy PWM obvod s NE555 na regulaciu vykonu.
-
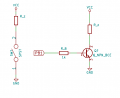 Schema 1
Schema 1 -
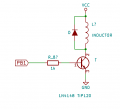 Schema 2
Schema 2 -
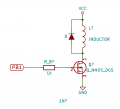 Schema 3
Schema 3 -
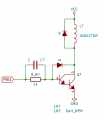 Schema 4
Schema 4 -
 Schema 5
Schema 5





{kind=link}
Katalógové údaje (datasheet)
- Spínacia dióda 1N4148
- Usmerňovacia dióda 1N4001
- Darlington NPN Tranzistor TIP120
- Výkonový HEXFET Mosfet Tranzistor IRF530
- Relé M4-5H
Linky
- http://www.ermicro.com/blog/?p=423
- http://www.electronics-tutorials.ws/transistor/tran_4.html
- https://en.wikibooks.org/wiki/Practical_Electronics/Stepper_Motors
- http://www.electro-tech-online.com/threads/how-to-protect-a-transistor-switch-using-a-diode.144829/
- http://electronics.stackexchange.com/questions/31014/where-should-i-put-the-kickback-diode-in-a-transistor-switch
- http://electronics.stackexchange.com/questions/93452/correct-use-of-flyback-or-snubber-diode-across-motor-or-transistor
Polovicny mostik
H-mostik
- ToDo