Generátor harmonického signálu: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| Riadok 10: | Riadok 10: | ||
</code> | </code> | ||
Zároveň bolo potrebné zmerať jeden bod frekvenčnej charakteristiky | Zároveň bolo potrebné zmerať jeden bod frekvenčnej charakteristiky systemu: | ||
<code> | <code> | ||
| Riadok 21: | Riadok 21: | ||
<code>T = 0.5 s</code>. | <code>T = 0.5 s</code>. | ||
Výstupný | Výstupný signal ma mat tvar: | ||
<code> | <code> | ||
| Riadok 35: | Riadok 35: | ||
== Analýza a opis riešenia == | == Analýza a opis riešenia == | ||
Cieľom riešenia je vytvoriť sínusový | Cieľom riešenia je vytvoriť sínusový signal bez použitia matematických funkcií sin() alebo cos(). Tento problem sa rieši pomocou diskrétneho oscilátora, ktorý vychádza z diferenciálnej rovnice harmonického kmitania. | ||
Základom je rovnica: | Základom je rovnica: | ||
| Riadok 49: | Riadok 49: | ||
==== Laplaceova transformacia ==== | ==== Laplaceova transformacia ==== | ||
Vychadzajme z prenosovej funkcie | Vychadzajme z prenosovej funkcie systemu: | ||
<code> | <code> | ||
| Riadok 58: | Riadok 58: | ||
<code> | <code> | ||
Y(s) · (T · s + 1 | Y(s) · (T · s + 1) | ||
T · s · Y(s) + Y(s) = X(s) | T · s · Y(s) + Y(s) = X(s) | ||
</code> | </code> | ||
| Riadok 68: | Riadok 68: | ||
</code> | </code> | ||
Týmto získame diferenciálnu rovnicu | Týmto získame diferenciálnu rovnicu systemu v časovej oblasti. | ||
==== Diskretizácia ==== | ==== Diskretizácia ==== | ||
| Riadok 124: | Riadok 124: | ||
</code> | </code> | ||
Tento vzťah generuje stabilný sínusový | Tento vzťah generuje stabilný sínusový signal bez zmeny amplitúdy. | ||
==== Výpočet parametrov ==== | ==== Výpočet parametrov ==== | ||
| Riadok 135: | Riadok 135: | ||
kde: | kde: | ||
<code>T = 0.5 s</code> | <code>T = 0.5 s</code> | ||
<code>ω = 1 / T = 2 rad/s</code> | <code>ω = 1 / T = 2 rad/s</code> | ||
<code>SAMPLE_RATE = 1000 Hz</code> | <code>SAMPLE_RATE = 1000 Hz</code> | ||
<code>T_s = 0.001 s</code> | <code>T_s = 0.001 s</code> | ||
| Riadok 177: | Riadok 177: | ||
kde: | kde: | ||
<code>A0 = 128</code> | |||
<code>A0 = 128</code> | |||
<code>A1 = 100</code> | <code>A1 = 100</code> | ||
==== Diskretizacia | ==== Diskretizacia systemu <code>1 / (sT + 1)</code> ==== | ||
Zo spojitej rovnice: | Zo spojitej rovnice: | ||
| Riadok 215: | Riadok 216: | ||
=== Algoritmus a program === | === Algoritmus a program === | ||
Algoritmus programu využíva diskrétny oscilátor a numerickú aproximáciu | Algoritmus programu využíva diskrétny oscilátor a numerickú aproximáciu systemu <code>1 / (sT + 1)</code>. Zakladne výpočty prebiehajú v prerušení Timer1 s frekvenciou 1 kHz: | ||
* výpočet oscilátora | * výpočet oscilátora | ||
* generovanie vstupu x | * generovanie vstupu x | ||
* výpočet výstupu | * výpočet výstupu systemu | ||
* výstup cez PWM | * výstup cez PWM | ||
* odosielanie dát cez UART | * odosielanie dát cez UART | ||
| Riadok 388: | Riadok 389: | ||
</tabs> | </tabs> | ||
Zdrojovy kod: [[Média:MykytaOleksandr_sources.zip|MykytaOleksandr_sources.zip]] | |||
=== Overenie === | === Overenie === | ||
Funkcia | Funkcia systemu bola overená pomocou výpisu dát cez UART. Do sériového portu sa posielajú dvojice hodnot: | ||
<code>x, y_sys</code> | <code>x, y_sys</code> | ||
Tieto hodnoty je možné zobraziť napríklad pomocou '''SerialPlot''', kde je viditeľný vstupný sínusový | Tieto hodnoty je možné zobraziť napríklad pomocou '''SerialPlot''', kde je viditeľný vstupný sínusový signal a výstup systemu. | ||
| Riadok 410: | Riadok 411: | ||
Pri overovaní bolo sledované, či: | Pri overovaní bolo sledované, či: | ||
amplituda výstupu zodpovedá očakávaniu | |||
system vykazuje fázový posun | |||
priebeh | priebeh signalu je stabilný bez driftu | ||
výstup reaguje správne na vstupný sínus | výstup reaguje správne na vstupný sínus | ||
Zo signálov je možné pozorovať zmenu | Zo signálov je možné pozorovať zmenu amplitudy a fázový posun, čo predstavuje bod frekvenčnej charakteristiky systemu. | ||
| Riadok 422: | Riadok 423: | ||
<center><youtube>MkgRE0QNgtk</youtube></center> | <center><youtube>MkgRE0QNgtk</youtube></center> | ||
Video demonštruje reálne správanie | Video demonštruje reálne správanie systemu. Je na ňom viditeľné generovanie sínusového signalu, jeho spracovanie systemom a výstupné dáta zobrazené v '''SerialPlot'''. Video slúži na overenie, že implementacia funguje podľa očakávania. | ||
== Čo by som urobil inak == | == Čo by som urobil inak == | ||
Pri riešení by bolo možné použiť presnejšiu metódu diskretizacie | Pri riešení by bolo možné použiť presnejšiu metódu diskretizacie systemu 1 / (sT + 1), napríklad bilineárnu transformaciu, ktorá by zlepšila presnosť modelu. | ||
Taktiež by bolo možné implementovať presnejší výpočet cos(θ) bez aproximacie, napríklad pomocou lookup tabuľky. | Taktiež by bolo možné implementovať presnejší výpočet cos(θ) bez aproximacie, napríklad pomocou lookup tabuľky. | ||
Ďalším zlepšením by mohlo byť automatické vyhodnotenie | Ďalším zlepšením by mohlo byť automatické vyhodnotenie amplitudy a fázového posunu priamo v mikrokontroleri namiesto spracovania na PC. | ||
[[Category:AVR]] [[Category:MIPS]] | [[Category:AVR]] [[Category:MIPS]] | ||
Verzia z 16:07, 18. apríl 2026
Záverečný projekt predmetu MIPS / LS2026 - Oleksandr Mykyta
Zadanie
Úlohou bolo generovať harmonický signál bez použitia funkcií sin() alebo cos(). Na tento účel bol použitý oscilátor realizovaný ako prenosová funkcia:
H(s) = 1 / ((s · T)^2 + 1)
Zároveň bolo potrebné zmerať jeden bod frekvenčnej charakteristiky systemu:
H(s) = 1 / (s · T + 1)
pre frekvenciu:
ω = 1 / T,
kde
T = 0.5 s.
Výstupný signal ma mat tvar:
A₀ + A₁ · sin(ωt + φ)
kde:
A₀ = 128,
A₁ = 100.
Analýza a opis riešenia
Cieľom riešenia je vytvoriť sínusový signal bez použitia matematických funkcií sin() alebo cos(). Tento problem sa rieši pomocou diskrétneho oscilátora, ktorý vychádza z diferenciálnej rovnice harmonického kmitania.
Základom je rovnica:
y + ω²y = 0
Táto rovnica popisuje harmonické kmity a jej riešením sú funkcie sin() a cos(). To znamená, že ak vieme túto rovnicu numericky riešiť, vieme generovať sínus.
Teoretický základ a odvodenia
Laplaceova transformacia
Vychadzajme z prenosovej funkcie systemu:
H(s) = Y(s) / X(s) = 1 / (T · s + 1)
Po úprave:
Y(s) · (T · s + 1)
T · s · Y(s) + Y(s) = X(s)
Použitím inverznej Laplaceovej transformacie (kde s predstavuje deriváciu) dostaneme:
T · dy(t)/dt + y(t) = x(t)
Týmto získame diferenciálnu rovnicu systemu v časovej oblasti.
Diskretizácia
Mikrokontrolér pracuje v diskrétnom čase, preto je potrebné nahradiť derivácie rozdielmi medzi vzorkami.
Pre druhú deriváciu použijeme aproximáciu:
y ≈ (y[n] − 2y[n−1] + y[n−2]) / T_s²
Po dosadení do y + ω²y = 0:
y[n] = (2 / (1 + ω²T_s²)) · y[n−1] − (1 / (1 + ω²T_s²)) · y[n−2]
Táto rovnica predstavuje numerickú aproximáciu oscilátora, ale nie je ideálna z hľadiska stability amplitúdy.
Diskrétny oscilátor (presný model)
Presnejší prístup vychádza z trigonometrických identít:
sin(A + B) = sin(A)cos(B) + cos(A)sin(B)
sin(A − B) = sin(A)cos(B) − cos(A)sin(B)
Po sčítaní:
sin(A + B) + sin(A − B) = 2 · sin(A) · cos(B)
Dosadením:
A = (n−1)θ,
B = θ
dostaneme:
sin(nθ) + sin((n−2)θ) = 2 · cos(θ) · sin((n−1)θ)
Označením:
y[n] = sin(nθ)
vznikne rekurentný vzťah:
y[n] = 2 · cos(θ) · y[n−1] − y[n−2]
Tento vzťah generuje stabilný sínusový signal bez zmeny amplitúdy.
Výpočet parametrov
Platí:
θ = ω · T_s
kde:
T = 0.5 s
ω = 1 / T = 2 rad/s
SAMPLE_RATE = 1000 Hz
T_s = 0.001 s
θ = 0.002
Aproximacia cos()
Keďže nie je dovolené použiť funkciu cos(), použije sa Taylorov rozvoj:
cos(θ) ≈ 1 − θ²/2
Z toho:
2cos(θ) ≈ 2 · (1 − θ²/2)
Inicializácia oscilátora
Pre správnu činnosť oscilátora sú potrebné počiatočné hodnoty:
y1 = 1,
y2 = 1 − θ²/2
Generovanie signálu
Oscilátor generuje hodnoty v rozsahu:
[-1, 1]
Požadovaný výstup:
x = A0 + A1 · y
kde:
A0 = 128
A1 = 100
Diskretizacia systemu 1 / (sT + 1)
Zo spojitej rovnice:
T · dy/dt + y = x
Použitím Eulerovej metódy:
dy/dt ≈ (y[n] − y[n−1]) / T_s
Po úprave:
y[n] = x − (T / T_s) · y[n] − (T / T_s) · y[n−1]
y[n] · (1 + (T / T_s)) = x − (T / T_s) · y[n−1]
y[n] = (T_s / (T + T_s)) · x + (T / (T + T_s)) · y[n−1]
Po zavedení:
α = T_s / (T + T_s)
dostaneme praktický tvar:
y[n] = α · x + (1 − α) · y[n−1]
y[n] = y[n−1] + α · (x − y[n−1])
Algoritmus a program
Algoritmus programu využíva diskrétny oscilátor a numerickú aproximáciu systemu 1 / (sT + 1). Zakladne výpočty prebiehajú v prerušení Timer1 s frekvenciou 1 kHz:
- výpočet oscilátora
- generovanie vstupu x
- výpočet výstupu systemu
- výstup cez PWM
- odosielanie dát cez UART
#define F_CPU 16000000UL
#include <avr/io.h>
#include <avr/interrupt.h>
#include <stdio.h>
#include "uart.h"
#define SAMPLE_RATE 1000.0
#define T 0.5
#define A0 128
#define A1 100
float OSC_COEFF;
volatile float y = 0;
volatile float y1 = 0;
volatile float y2 = 0;
volatile float y_sys = 0;
float alpha;
FILE mystdout = FDEV_SETUP_STREAM(uart_putc, NULL, _FDEV_SETUP_WRITE);
ISR(TIMER1_COMPA_vect)
{
y = OSC_COEFF * y1 - y2;
y2 = y1;
y1 = y;
float x = A0 + A1 * y;
y_sys = y_sys + alpha * (x - y_sys);
OCR0A = (uint8_t)(y_sys);
printf("%d,%d\n", (int)x, (int)y_sys);
}
void timer1_init()
{
TCCR1B |= (1 << WGM12);
OCR1A = 15999;
TCCR1B |= (1 << CS10);
TIMSK1 |= (1 << OCIE1A);
}
void pwm_init()
{
DDRD |= (1 << PD6);
TCCR0A |= (1 << COM0A1) | (1 << WGM01) | (1 << WGM00);
TCCR0B |= (1 << CS01);
}
int main(void)
{
uart_init();
stdout = &mystdout;
pwm_init();
timer1_init();
float Ts = 1.0 / SAMPLE_RATE;
alpha = Ts / (T + Ts);
float theta = (1.0 / T) * (1.0 / SAMPLE_RATE);
y1 = 1.0;
y2 = 1.0 - (theta * theta) / 2.0;
OSC_COEFF = 2.0 * (1.0 - (theta * theta) / 2.0);
sei();
while (1)
{
}
}
#define set_bit(ADDRESS,BIT) (ADDRESS |= (1<<BIT))
#define clear_bit(ADDRESS,BIT) (ADDRESS &= ~(1<<BIT))
#ifndef UART_H_
#define UART_H_
#include <stdio.h>
#define BAUD_PRESCALE (((F_CPU / (BAUDRATE * 16UL))) - 1)
void uart_init( void );
int uart_putc( char c, FILE *stream );
void uart_puts( const char *s );
char uart_getc( void );
void delay(int delay);
#endif /* UART_H_ */
#include <avr/io.h>
#include <util/delay.h>
#include "uart.h"
void uart_init( void )
{
#include <util/setbaud.h>
UBRR0H = UBRRH_VALUE;
UBRR0L = UBRRL_VALUE;
#if USE_2X
UCSR0A |= (1 << U2X0);
#else
UCSR0A &= ~(1 << U2X0);
#endif
UCSR0C = _BV(UCSZ01) | _BV(UCSZ00);
UCSR0B = _BV(RXEN0) | _BV(TXEN0);
}
int uart_putc(char c, FILE *stream)
{
if (c == '\n')
{
loop_until_bit_is_set(UCSR0A, UDRE0);
UDR0 = '\r';
}
loop_until_bit_is_set(UCSR0A, UDRE0);
UDR0 = c;
return 0;
}
void uart_puts(const char *s)
{
}
char uart_getc(void)
{
loop_until_bit_is_set(UCSR0A, RXC0);
return UDR0;
}
void delay(int delay)
{
for (int i=1; i<=delay; i++)
_delay_ms(1);
}
Zdrojovy kod: MykytaOleksandr_sources.zip
Overenie
Funkcia systemu bola overená pomocou výpisu dát cez UART. Do sériového portu sa posielajú dvojice hodnot:
x, y_sys
Tieto hodnoty je možné zobraziť napríklad pomocou SerialPlot, kde je viditeľný vstupný sínusový signal a výstup systemu.
Namerené priebehy vstupu a výstupu zo Serial Plot
-
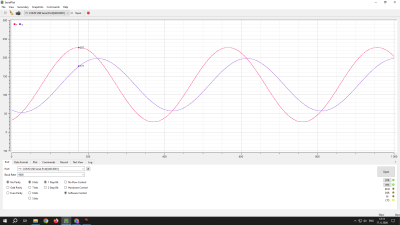
x_max = 227 -
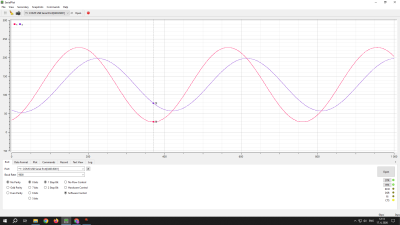
x_min = 28 -
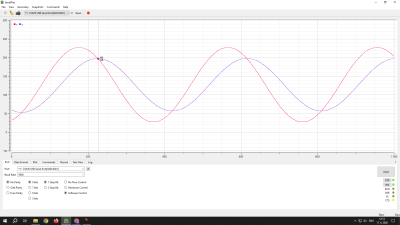
y_max = 198 -
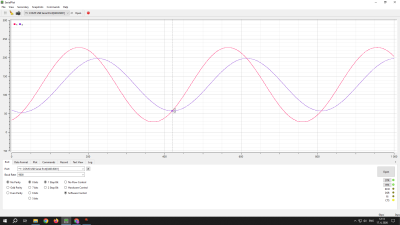
y_min = 57




Pri overovaní bolo sledované, či:
amplituda výstupu zodpovedá očakávaniu system vykazuje fázový posun priebeh signalu je stabilný bez driftu výstup reaguje správne na vstupný sínus
Zo signálov je možné pozorovať zmenu amplitudy a fázový posun, čo predstavuje bod frekvenčnej charakteristiky systemu.
Video:
Video demonštruje reálne správanie systemu. Je na ňom viditeľné generovanie sínusového signalu, jeho spracovanie systemom a výstupné dáta zobrazené v SerialPlot. Video slúži na overenie, že implementacia funguje podľa očakávania.
Čo by som urobil inak
Pri riešení by bolo možné použiť presnejšiu metódu diskretizacie systemu 1 / (sT + 1), napríklad bilineárnu transformaciu, ktorá by zlepšila presnosť modelu.
Taktiež by bolo možné implementovať presnejší výpočet cos(θ) bez aproximacie, napríklad pomocou lookup tabuľky.
Ďalším zlepšením by mohlo byť automatické vyhodnotenie amplitudy a fázového posunu priamo v mikrokontroleri namiesto spracovania na PC.