MEMS 3D akcelerometer: Rozdiel medzi revíziami
Zo stránky SensorWiki
Bez shrnutí editace |
|||
| (5 medziľahlých úprav od jedného ďalšieho používateľa nie je zobrazených) | |||
| Riadok 192: | Riadok 192: | ||
''' Obr. č. 10 Zapojenie snímača''' | ''' Obr. č. 10 Zapojenie snímača''' | ||
= Zmena riešenia = | |||
Na realizáciu akcelerometra sme nakoniec nevyužili senzor LSM6DS0. Pri snahe o komunikáciu medzi doskou MEMS Inertial Nucleo a senzorom LSM6DS0 zlyhalo spojenie. Zobrazenie časti programu, ktorá mala zabezpečiť komunikáciu: | |||
<source lang="c"> | |||
void setup() { | |||
Serial.begin(SerialSpeed); | |||
Wire.begin(); | |||
Wire.beginTransmission(0xD4); | |||
Wire.write(0x20); //register ovládajúci senzor lineárneho zrýchlenia | |||
Wire.write(byte(0x00)); | |||
Wire.endTransmission(); | |||
</source> | |||
Po dohode s cvičiacim sme program dokončili pomocou MPL3115A2: High-precision Pressure Sensor, ktorý sa nachádza na doske Xtrinsic Sensors board. Následne sme vytvorili program, ktorý vypočíta nadmorskú výšku a prislúchajúci tlak. | |||
| Riadok 268: | Riadok 289: | ||
delay(500); | delay(500); | ||
float pomocna = (lsb>>4)/16.0; // bitový posun doprava o 4 bity a delenie s 16 | float pomocna = (lsb>>4)/16.0; // bitový posun doprava o 4 bity a delenie s 16 | ||
| Riadok 314: | Riadok 334: | ||
== Overenie == | == Overenie == | ||
''' Používateľský návod:''' | |||
'''1.''' Používateľ vyberie v prostredí Arduino dosku s ktorou pracuje: Nástroje -> Doska -> Arduino Genuino/Uno | |||
[[Image:doskaTl.jpg]] | [[Image:doskaTl.jpg]] | ||
| Riadok 329: | Riadok 347: | ||
'''2.''' Následne si používateľ určí COM portu, na ktorý je doska pripojená: Nástroje -> Port -> "XY"COM | |||
[[Image:port.jpg]] | [[Image:port.jpg]] | ||
| Riadok 337: | Riadok 355: | ||
'''3.''' Po napísaní programu si môže používateľ overiť správnosť kódu pomocou funkcie VERIFY a hneď potom môže pristúpiť k nahratiu programu na dosku pomocou šípky -> | |||
[[Image:spustanie.jpg]] | [[Image:spustanie.jpg]] | ||
| Riadok 345: | Riadok 363: | ||
'''4.''' Zobrazenie výsledku dosiahne používateľ po kliknutí na funkciu Monitor sériového portu (lupa napravo GUI) | |||
[[Image:Seriovyport.jpg]] | [[Image:Seriovyport.jpg]] | ||
| Riadok 353: | Riadok 371: | ||
'''5.''' Tu vidíme, po rozkliknutí vyššie uvedenej funkcie, výstup nášho programu :-) | |||
[[Image:output.jpg]] | [[Image:output.jpg]] | ||
| Riadok 360: | Riadok 378: | ||
[[Category:AVR]] [[Category:DVPS]] | [[Category:AVR]] [[Category:DVPS]] [[Category:MEMS]] [[Category:I2C]] | ||
Aktuálna revízia z 21:26, 11. december 2017
| Autori: | Eva Bartalová, Romana Čápková |
| Študijný odbor: | Aplikovaná mechatronika a elektromobilita |
| Ročník: | 1. ročník IŠ (2015/2016) |
Zadanie
Využitím akcelerometra, ktorý sa nachádza na doske MEMS Inertial Nucleo navrhnite a vytvorte aplikáciu, ktorý bude merať zrýchlenie.
Úlohy:
- Nájdite si k senzorom datasheet
- Nájdite si schémy zapojenia dosky
- Na základe predošlých vedomostí navrhnite spôsob pripojenia k riadiacej jednotke
- Napíšte základný demonštračný program využívajúci vaše funkcie
- Vymyslite a demonštrujte vhodnú aplikáciu

Obr. č. 1 MEMS Inertial Nucleo
Zoznam senzorov, ktoré sa nachádzajú na doske:
- LSM6DS0: MEMS 3D accelerometer (±2/±4/±8 g) + 3D gyroscope (±245/±500/±2000 dps)
- LIS3MDL: MEMS 3D magnetometer (±4/ ±8/ ±12/ 16 gauss)
- LPS25HB*: MEMS pressure sensor, 260-1260 hPa absolute digital output barometer
- HTS221: capacitive digital relative humidity and temperature

Obr. č. 2 MEMS Inertial Nucleo - rozdelenie senzorov
Literatúra:
- Zoznam použitej literatúry, vrátane katalógových údajov (datasheet), internetových odkazov a pod.
Analýza riešenia
Na realizáciu akcelerometra sme využili senzor LSM6DS0.
Senzor LSM6DS0
LSM6DS0 je integrovaný obvod, ktorý zahŕňa 3D digitálny akcelerometer a 3D digitálny gyroskop. Jednotlivé snímače sú vyrábané pomocou špeciálnej techniky tzv. micromachining, zatiaľ čo rozhranie IC využíva CMOS technológiu. LSM6DS0 má dva režimy použitia. Prvý režim predstavuje aktiváciu akcelerometera a gyroskopu naraz na rovnakom ODR. Druhý režim predstavuje aktiváciu akcelerometera a deaktiváciu gyroskopu.
LSM6DS0 je uložený v 3 mm x 3mm x 0.86 mm LGA púzdre.
Vlastnosti:
- Analógové napájacie napätie: 1.71 V až 3.6 V
- Nezávislé I/O napájanie (1.71 V)
- Nízkovýkonový režim 1.8 mA
- Meranie zrýchlenia v smere osi X,Y,Z
- ±2/±4/±8/±16 g full scale
- ±245/±500/±2000 dps full scale
- SPI/I2C rozhranie
- Vstavený snímač tepla
- Vstavané FIFO
Vývody

Popis jednotlivých pinov a ich funkcia:

Registre
LSM6DS0 má dve operačné módy: iba akcelerometer je zapnutý a gyroskop je vypnutý (register CTRL_REG6_XL (20h)) alebo akcelerometer a gyropskop sú zapnuté na rovnakom ODR (register CTRL_REG1_G (10h)).

Obr. č. 3 Módy senzora LSM6DS0
CTRL_REG6_XL (20h) Register ovládajúci senzor lineárneho zrýchlenia. Predstavuje register na zápis údajov.

Obr. č. 4 CTRL_REG6_XL register
Kde jednotlivé bity predstavujú
| ODR_XL [2:0] | Output data rate and power mode slection. Defaultne je nastavená hodnota 000 |
| FS_XL [1:0] | Výber maximálneho rozhrania. Defaultne je nastavená hodnota 00, (00: ±2g; 01: ±16g; 10: ±4g; 11: ±8g) |
| BW_SCAL_ODR | Bandwidth selection. Defaultne je nastavená hodnota 0 |
| BW_XL [1:0] | Anti-aliasing filter. Defaultne je nastavená hodnota 00 (00: 408 Hz; 01: 211 Hz; 10: 105 Hz; 11: 50 Hz) |
Ďalej sme využili nasledovné registra ako Output:
OUT_X_XL (28h - 29h) Výstupný register pre meranie lineárneho zrýchlenia v smere osi X. Hodnota je vyjadrená ako 16-bitové slovo s dvojkovým doplnkom.
OUT_Y_XL (2Ah - 2Bh) Výstupný register pre meranie lineárneho zrýchlenia v smere osi Y. Hodnota je vyjadrená ako 16-bitové slovo s dvojkovým doplnkom.
OUT_Z_XL (2Ch - 2Dh) Výstupný register pre meranie lineárneho zrýchlenia v smere osi Z. Hodnota je vyjadrená ako 16-bitové slovo s dvojkovým doplnkom.
Sériové rozhrania
Registre vo vnútri senzora LSM6DS0 umožňujú prístup aj pre I2C a SPI sériové rozhranie. Pričom SPI môže byť nakonfigurovaný tak, aby SW pracovalo buď v 3-wire alebo 4-wire režime. Sériové rozhrania sú mapované na rovnakých pinoch. Pre využitie rozhrania I2C, musí byť pin CS pripojený k Vdd_IO.
Zbernica I2C
“Inter-Integrated Circuit” protokol a zbernicu vyvinula firma Philips Semiconductor pôvodne pre svoje TV prijímače v roku 1980, za účelom komunikácie medzi IO na jednej DPS pri použití minimálneho množstva pinov. Špecifikácia zbernice I2C je založená na jednoduchých hardvérových štandardoch (nie sú potrebné špeciálne konektory alebo kabeláž)
Základné pojmy
- Master - začína a končí dátový prenos generovaním štart bitu a stop bitu - generuje hodinový signál - vysiela adresu podriadeného IO, pre ktorý budú dáta určené - určuje smer prenosu dát
- Slave - odpovedá iba v prípade, že rozpoznal svoju adresu - časovanie prenosu je riadené hodinovým signálom
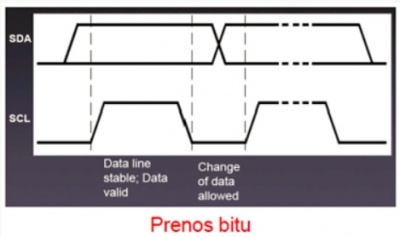 Obr. č. 5 Prenos bitu
Obr. č. 5 Prenos bitu

- Štart bit a Stop bit - začiatok alebo koniec prenosu je definovaný dátovej linky z vysokej na úroveň. Prenos prechodom nízku (štart bit) alebo z nízkej na vysokú úroveň (stop bit) kým hodinový signál je na vysokej úrovni - po štart bite považujú všetky zariadenia zbernicu za zaneprázdnenú - po príchode stop bitu čakajú zariadenia istý čas a potom považujú zbernicu za voľnú Štart bit a stop bit
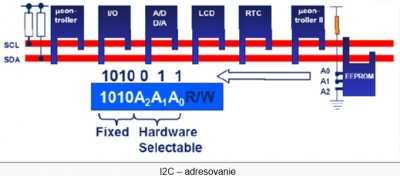

Obr. č. 6 I2C - Adresovanie
Opis
Existujú dva signály spojené s I2C zbernicou: Serial Clock Line (SCL - slúži pre prenos hodinového signálu) a Serial Data Line (SDA - slúži pre prenos sériových dát). SDA je obojsmerná linka, ktorá slúži na odosielanie a prijímanie dát do / z rozhrania. Obe linky musia byť pripojené k Vdd_IO prostredníctvom externého pull-up rezistorov.
Transakcia na zbernici je spustená pomocou signálu ŠTART (ST). Po štart podmienke sa vysiela na zbernicu 7bitove číslo – adresa SLAVE zariadenia (SAD) s ktorým chceme komunikovať – doplnené o najnižší bit, ktorý značí či chceme do zariadenia dáta zapisovať alebo z neho dáta prijímať (čítať).
Slave adresa (SAD) pridružená k LSM6DS0 je 110101xb. Ak je SDO/SA0 pin pripojený k zdroju napätia, LSB je '1' (adresa 1101011b), inak ak je SDO/SA0 pin pripojený k zemi, LSB hodnota "0" (adresa 1101010b). Toto riešenie umožňuje pripojiť sa a riešiť dve rôzne zotrvačné moduly na rovnakej zbernici I2C.
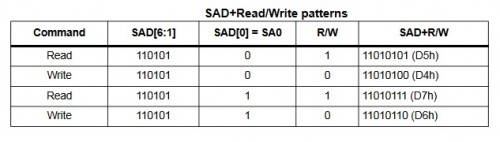

Obr. č. 7 Adresy zariadenia
Prenos dát potvrdením je povinný. Vysielač musí uvoľniť SDA linku počas potvrdzovacieho impulzu. Prijímač musí potom ťahať dáta linky na nízkej úrovni, takže zostáva stabilný na nízkej úrovni aj počas high doby impulzu, ktoré potvrdzujú hodiny (clock). Prijímač, ktorý bol určený je povinný vygenerovať potvrdenie po každom bajte prijatých dát. I2C vložený vo vnútri LSM6DS0 sa správa ako slave a nasledujúci protokol musí byť dodržaný. Po počiatočnom stave (ST) slave adresa je odoslaná, akonáhle príde jedno slave vrátené potvrdenie (SAK) sa prenáša 8-bitová sub-adresa (SUB). Prírastok adresy je nakonfigurovaný CTRL_REG8 (22h) (IF_ADD_INC).
Slave adresa je kompletná s Read/Write bitmi. V prípade, že bit je '1' (Read), opakovane zadaná podmienka START (SR) musí byť vydaná po dvoch sub-adries bajtov. Ak je bit "0" (Write) master bude vysielať na slave s nezmeneným smerom.
Popis riešenia
Nasledujúci obrázok predstavuje schému zapojenia snímača LSM6DS0, kde jednotlivé Piny sú opísané v časti Vývody.

Obr. č. 8 Schéma zapojenia snímača
Snímač LSM6DS0 sme pripojili na dosku Arduino UNO.

Obr. č. 9 Arduino UNO
Napájanie a komunikácia riadiacej jednotky je zabezpečená z PC cez USB rozhranie. Pripojenie senzora na dosku vyzerá nasledovne:

Obr. č. 10 Zapojenie snímača
Zmena riešenia
Na realizáciu akcelerometra sme nakoniec nevyužili senzor LSM6DS0. Pri snahe o komunikáciu medzi doskou MEMS Inertial Nucleo a senzorom LSM6DS0 zlyhalo spojenie. Zobrazenie časti programu, ktorá mala zabezpečiť komunikáciu:
void setup() {
Serial.begin(SerialSpeed);
Wire.begin();
Wire.beginTransmission(0xD4);
Wire.write(0x20); //register ovládajúci senzor lineárneho zrýchlenia
Wire.write(byte(0x00));
Wire.endTransmission();
Po dohode s cvičiacim sme program dokončili pomocou MPL3115A2: High-precision Pressure Sensor, ktorý sa nachádza na doske Xtrinsic Sensors board. Následne sme vytvorili program, ktorý vypočíta nadmorskú výšku a prislúchajúci tlak.
Algoritmus a program
Program sme vyvíjali v prostredí Arduino 1.6.9. Program pozostáva z vytvorenia komunikácie medzi senzorom a zbernicou I2C, načítania senzorom nameraných hodnôt, výpočtu nadmorskej výšky, výpočtu tlaku a výpisu vypočítaných hodnôt na obrazovku.

Obr. č. 11 Vývojový diagram
1 Funkcia setup()
Po inicializácii knižnice Wire.h sa zavolá funkcia setup(), v ktorom sa pomocou funkcie begin() vytvorí prepojenie zbernice I2C a dosky. Volaním funkcie beginTransmission() sa vykoná I2C prenos zo slave zariadenia. Vstupom do tejto funkcie je adresa zariadenia. Následne dáta sú prenášané pomocou funkcie write(). Prenos so slave zariadenia sa zastavuje funkciou endTransmission()
void setup() {
Serial.begin(SerialSpeed);
Wire.begin();
Wire.beginTransmission(0xC0);
Wire.write(0x01);
Wire.write(byte(0x00));
Wire.endTransmission();
delay(1000);
Serial.begin(SerialSpeed);
Serial.println("Semestralne zadanie");
Serial.println("Meranie nadmorskej vysky a tlaku");
Serial.println("---------------------------------");
}
2 Funkcia loop()
Po vykovaní funkcie setup(), ktorá inicializuje a nastavuje počiatočné hodnoty, funkcie loop() opakovane vykonáva funkcionalitu program. Využíva sa na aktívne riadenie dosky Arduino. Pomocou funkcie requestFrom() master zariadenie vyžiada bajty od slave zariadenia (v našom prípade ide o 3 bajty). Funkcia read() slúži na prečítanie bajtov, ktoré boli poslané zo slave zariadenia na master. Pomocou rôznych bitových operácií a úprav sa v prvom rade vypočíta nadmorská výška v m a následne sa vypočíta tlak v hPa.
void loop() {
Wire.begin();
Wire.beginTransmission(0xC0);
Wire.write(0x04);
Wire.endTransmission();
Wire.requestFrom(0xC0,3);
byte msb, csb, lsb;
msb = Wire.read();
csb = Wire.read();
lsb = Wire.read();
delay(500);
float pomocna = (lsb>>4)/16.0; // bitový posun doprava o 4 bity a delenie s 16
float vys = (float)( (msb << 8) | csb) + pomocna; // výpocet nadmorskej výšky
// Hodnota tlaku sa vracia ako 20 bitové číslo posunuté doľava
long tlak_celk = (long)msb<<16 | (long)csb<<8 | (long)lsb;
tlak_celk >>= 6;
lsb &= 0b00110000; //Bity 4 a 5 predstavujú desatinnú zložku
lsb >>= 4;
float tlak_dec = (float)lsb/4.0; //Prevedenie na zlomok
float tlak = (float)tlak_celk + tlak_dec; // výpočet tlaku
Serial.begin(SerialSpeed);
Serial.println("Nadmorska vyska v m");
Serial.println(NMM);
Serial.println();
Serial.println("Tlak v hPa");
Serial.println(tlak);
Serial.println();
delay(10000);
}
Zdrojový kód: senzor.ino
Overenie
Používateľský návod:
1. Používateľ vyberie v prostredí Arduino dosku s ktorou pracuje: Nástroje -> Doska -> Arduino Genuino/Uno

Obr. č. 12 Výber dosky
2. Následne si používateľ určí COM portu, na ktorý je doska pripojená: Nástroje -> Port -> "XY"COM

Obr. č. 13 Výber portu
3. Po napísaní programu si môže používateľ overiť správnosť kódu pomocou funkcie VERIFY a hneď potom môže pristúpiť k nahratiu programu na dosku pomocou šípky ->

Obr. č. 14 Spúšťanie
4. Zobrazenie výsledku dosiahne používateľ po kliknutí na funkciu Monitor sériového portu (lupa napravo GUI)

Obr. č. 15 Monitor sériového portu
5. Tu vidíme, po rozkliknutí vyššie uvedenej funkcie, výstup nášho programu :-)

Obr. č. 16 Výstup