Senzory na mikropočítači micro:bit: Rozdiel medzi revíziami
Zo stránky SensorWiki
| (6 medziľahlých úprav od rovnakého používateľa nie je zobrazených.) | |||
| Riadok 10: | Riadok 10: | ||
== <span style="background:Yellow"> Zoznam úloh </span> == | == <span style="background:Yellow"> Zoznam úloh </span> == | ||
'''Úloha 1:'''<BR> | |||
Vyskúšajte prácu so všetkými nižšie uvedenými senzormi podľa návodu a pokynov cvičiaceho. Keď to budete mať hotové, môžete sa pustiť do nasledovných dvoch úloh, ktoré treba aj odovzdať. | |||
'''Úloha | '''Úloha 2:'''<BR> | ||
Naprogramujte kompas, ktorý bude na displeji zobrazovať šipku podľa natočenia magnetického senzora. (8 polôh N, NE, E, SE, S, SW, W, NW). Na displeji má byť zobrazená šípka, nie písmená alebo uhol. | Naprogramujte kompas, ktorý bude na displeji zobrazovať šipku podľa natočenia magnetického senzora. (8 polôh N, NE, E, SE, S, SW, W, NW). Na displeji má byť zobrazená šípka, nie písmená alebo uhol. | ||
<BR> | <BR> | ||
| Riadok 24: | Riadok 28: | ||
'''Úloha | '''Úloha 3:'''<BR> | ||
<!-- | <!-- | ||
Zoberte ľubovoľný iný senzor a zobrazte jeho hodnotu na stupnici s LED diód alebo ako ručičku, ktorou na stupnici hýbe motorček. | Zoberte ľubovoľný iný senzor a zobrazte jeho hodnotu na stupnici s LED diód alebo ako ručičku, ktorou na stupnici hýbe motorček. | ||
<BR> | <BR> | ||
Jediný zádrhel v tejto úlohe spočíva v tom, že musíte správne pretransformovať rozsah daného snímača do rozsahu LED pásiku alebo motorčeka. | Jediný zádrhel v tejto úlohe spočíva v tom, že musíte správne pretransformovať rozsah daného snímača do rozsahu LED pásiku alebo motorčeka. | ||
--> | |||
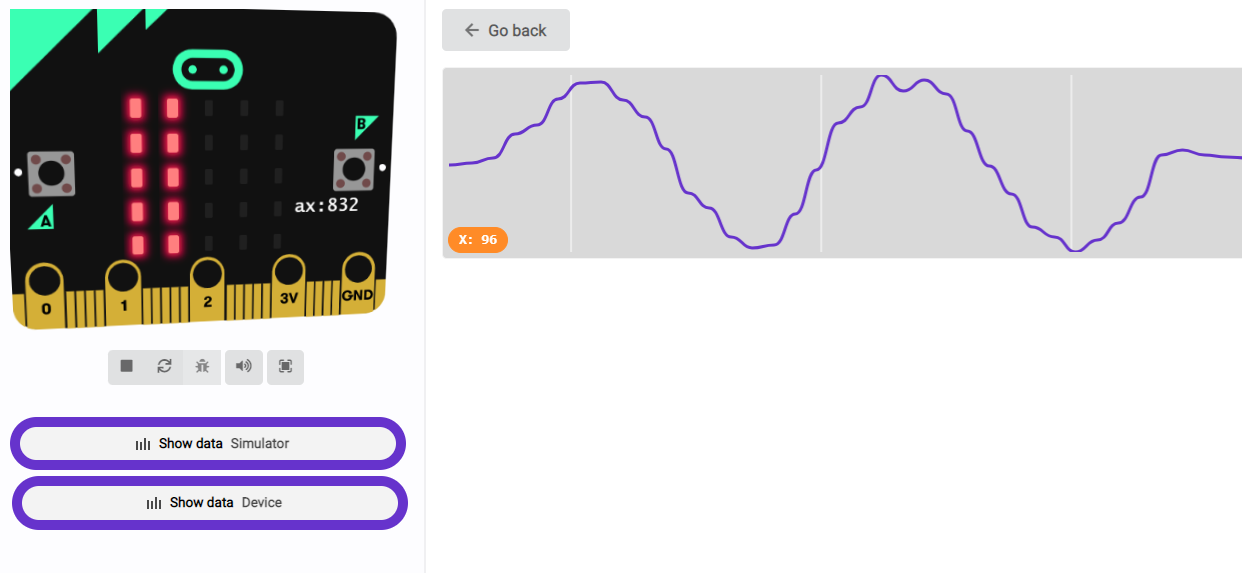
Pretočte micro:bit o 360 stupňov okolo osi x a zobrazte tento pohyb na grafe zrýchlenia v príslušnej osi, ktorý potom odovzdáte. (z grafu musí byť jasne vidno, že ste spravili celú otočku). Ak to nestihnete na cvičení, môžete ju spraviť | |||
aj v simulátore.<BR>Ukážka: [https://senzor.robotika.sk/zp/accelerometer.png takto nejako by to mohlo vyzerať] | |||
<BR> | <BR> | ||
<BR> | |||
Ak vám oba programy fungujú, spravte | Ak vám oba programy fungujú, spravte screenshot, zachytávajúci váš program aj samotný microbit a odovzdajte ho ako riešenie v Classroome. | ||
'''Termín:''' ihneď po cvičení, najneskôr však 2.12. | '''Termín:''' ihneď po cvičení, najneskôr však 2.12. | ||
Aktuálna revízia z 22:31, 25. november 2022
Na tomto cvičení sa oboznámite so všetkými senzormi, ktoré sú dostupné na mikropočítači micro:bit.
Zoznam úloh
Úloha 1:
Vyskúšajte prácu so všetkými nižšie uvedenými senzormi podľa návodu a pokynov cvičiaceho. Keď to budete mať hotové, môžete sa pustiť do nasledovných dvoch úloh, ktoré treba aj odovzdať.
Úloha 2:
Naprogramujte kompas, ktorý bude na displeji zobrazovať šipku podľa natočenia magnetického senzora. (8 polôh N, NE, E, SE, S, SW, W, NW). Na displeji má byť zobrazená šípka, nie písmená alebo uhol.
Rozdeľte 360 stupňov na príslušné intervaly a v každom znich zobrazíte správnu šípku. Nie je nevyhnutné kresliť každú z nich
ručne, existuje na to špeciálny blok. Pozor však dajte na smerovanie na sever, musí obsahovať aj hodnoty okolo nuly aj okolo 360.
Pre kontrolu, smerov je 8: S, SV, V, JV, J, JZ, Z a SZ. Na obrazovke však nebudete zobrazovať ani uhol (číslo), ani text (JZ)
ale naozaj obrázok šípky.
Ukážka: takto nejako by to malo vyzerať
Úloha 3:
Pretočte micro:bit o 360 stupňov okolo osi x a zobrazte tento pohyb na grafe zrýchlenia v príslušnej osi, ktorý potom odovzdáte. (z grafu musí byť jasne vidno, že ste spravili celú otočku). Ak to nestihnete na cvičení, môžete ju spraviť
aj v simulátore.
Ukážka: takto nejako by to mohlo vyzerať
{kind=link}
Ak vám oba programy fungujú, spravte screenshot, zachytávajúci váš program aj samotný microbit a odovzdajte ho ako riešenie v Classroome.
Termín: ihneď po cvičení, najneskôr však 2.12.
Snímač teploty
Výstup:
číslo -- teplota od -5 po +50 (nekalibrovaný odhad).
Mikropočítač micro:bit vlastne nemá špecializovaný snímač teploty okolia. Hodnota, ktorú zobrazuje nasledovný program je odvodená z interného snímača teploty, ktorý meria teplotu jadra procesora. Keďže procesor nie je našimi programami veľmi zaťažený a je to relatívne výkonný ARM procesor, pri činnosti sa veľmi neohrieva a preto je keho teplota celkom dobrou aproximáciou teploty okolia. Snímač teploty má vysoké rozlíšenie (t.j. je schopný detekovať aj zmeny o desatiny stupňa), ale nie je kalibrovaný, preto môže detekovať trebárs 20 stupňov hoci teplota je v skutočnosti len 17. Napriek tomu je však dostatočne citlivý a reaguje aj na malé zmeny teploty.

Snímač intenzity svetla
Výstup:
číslo -- intenzita osvetlenia od 0 (tma) po 255 (silné svetlo).

Funkcia:
Mikropočítač micro:bit nemá žiaden špeciálny senzor na snímanie intenzity osvetlenia. Ako je možné, že teda svetlo meriame?
Používa na to LED diódy maticového displeja v reverznom zapojení, kedy využívame náboj na P-N priechode v závernom smere. Jeho množstvo je ovplyvnené dopadajúcim svetlom a množstvo náboja potom vieme odmerať nepriamo ako čas potrebný na vybitie parazitného kondenzátora na priechodne. Táto "finta" sa používa už dlho.
LED diódu pri tom používame oboma spôsobmi - najprv výstup mikroprocesora privedie napätie na LED, ktorá sa rozsvieti. Potom mikrokontrolér zmení smer na vstupný a meria čas, kým napätie na prechode LED diódy nekleesne pod referenčnú hodnotu. Tento čas je zhruba úmerný množstvu svetla dopadajúcemu na PN prechod.
Pre záujemcov o podrobnejšie vysvetlenie:
- http://www.merl.com/publications/docs/TR2003-35.pdf
- http://electronics.stackexchange.com/questions/902/detecting-light-with-an-led
- http://www.instructables.com/id/LEDs-as-light-sensors/
Snímač magnetického poľa
Výstup:
číslo -- smer od 0 po 359.
Ako snímač intenzity magnetického poľa je použitý špeciálny čip MAG3110. Na doštičke sa nachádza v ľavej zadnej časti.

Pred použitím senzora je potrebné vykonať jeho kalibráciu, vtedy sa na displeji zobrazí správa "Draw a circle!" Doštičkou treba opísať kruh a po ukončení kalibrácie sa spustí aplikačný program.
Hodnota nameranej veľkosti magnetického poľa je najprv prepočítaná do vodorovnej roviny a potom je výsledná hodnota v stupňoch z intervalu 0 a 359 prístupná cez "premennú" compass heading.

MAG3110: Freescale High Accuracy, 3-Axis Magnetometer
Ako snímač intenzity magnetického poľa je použitý špeciálny čip MAG3110. Je to digitálny trojosový magnetický snímač s nízkou spotrebou a širokým dynamickým rozsahom.
Snímač meria jednotlivé zložky (x-, y- a z-) lokálneho magnetického poľa, ktoré je tvorené predovšetkým magnetickým poľom zeme
a zároveň súčtom vplyvov od všetkých komponentov na doske plošného spoja a v jeho okolí. V spojení s akcelerometrom (informácia
o natočení a polohe) poskytuje informáciu o natočení voči zemskej osi pričom nie je nevyhnutné udržiavať ho vo vodorovnej polohe
ako bežný kompas. Meranie vo všetkých troch osiach umožňuje kompenzovať náklon senzora.
Samozrejme, že pri meraní nesmú byť v okolí iné silné zdroje magnetického poľa. K mikroprocesoru na doske je
pripojený cez komunikačné rozhranie I2C a je schopný merať magnetické polia do hodnoty 10 Gauss s opakovacou frekvenciou 80 Hz.
(viac info...)
Akcelerometer
Výstup:
Číslo - zrýchlenie vo zvolenej osi (x-, y- alebo z-) v mg v intervale +/-1023. Zrýchlenie 1g zodpovedá zemskej gravitácii. Ak je doštička položená vodorovne displejom nahor, tak x=0, y=0 and z=-1023.

Okrem toho máme možnosť softvérovo rozpoznávať nasledovné pohyby (gestá): up, down, left, right, face up, face down, freefall, 3g, 6g, 8g, shake. V praxi sa akcelerometre používajú napríklad na
- detekciu otrasov a seizmickej aktivity
- v autopilotoch na lodiach
- v navigačných systémoch
- stabilizáciu dronov
- stabilizáciu otrasov kamery
- detekciu nárazov a aktiváciu airbagov

Akcelerometer, alebo snímač zrýchlenia, je špeciálny čip, ktorý meria zrýchlenie v troch osiach (x-, y- a z-). K procesoru je pripojený cez zbernicu I2C.
Typ MMA8653FC Rozsah 3 osi, rozsahy ±2g/±4g/±8g Rozlíšenie 10 bitov (0..1023) Citlivosť 1 mg / LSB Max. rýchlosť 800Hz Spotreba 7 uA
Keďže podľa všeobecnej teórie relativity nevieme rozlíšiť účinky zrýchlenia a gravitácie, tak aj tento senzor nerozlišuje medzi gravitačným a mechanickým zrýchlením. Vyskúšajte si, že ak je senzor kolmo na podlahu, tak zložka g je nulová, zatiaľ čo pri pootočení o 90 stupňov nameriate vždy presne 1g.
Doplnky
Šipky
Aby ste sa nemuseli trápiť s vykreslovaním všetkých 8 šípok, použite blok SHOW ARROW z knižnice BASIC

Zmena rozsahov
Zmena rozsahov, tak aby vám aj pri minimálnej aj pri maximálnej hodnote zo senzora zobrazil displej alebo LED pásik alebo motorček to čo potrebujete sa dá spraviť rozličným spôsobom. Ale asi najjednoduchšie je to pomocou bloku MAP, ktorý nájdete v MATH knižnici. Vysvetľujúci obrázok snáď pomôže.

Stĺpcový graf
V tejto časti si ukážeme, ako vie micro:bit jednoduchým spôsobom zobraziť hodnotu premennej alebo meranej veličiny na displeji vo forme stĺpcového grafu. Jeho výška zodpovedá hodnote veličiny, pričom rozsah je od nula po maximálnu hodnotu, ktorú zadávame do progamového bloku. Zároveň sa v simulátore daná veličina zakresluje aj do časového diagramu.
