MEMS Cvičenie 8: Rozdiel medzi revíziami
Zo stránky SensorWiki
| Riadok 7: | Riadok 7: | ||
# Prepočítajte zmeranú dobu odozvy na vzdialenosť v cm (výpočet) | # Prepočítajte zmeranú dobu odozvy na vzdialenosť v cm (výpočet) | ||
# Pridajte kompenzáciu na vplyv teploty (výpočet) | # Pridajte kompenzáciu na vplyv teploty (výpočet) | ||
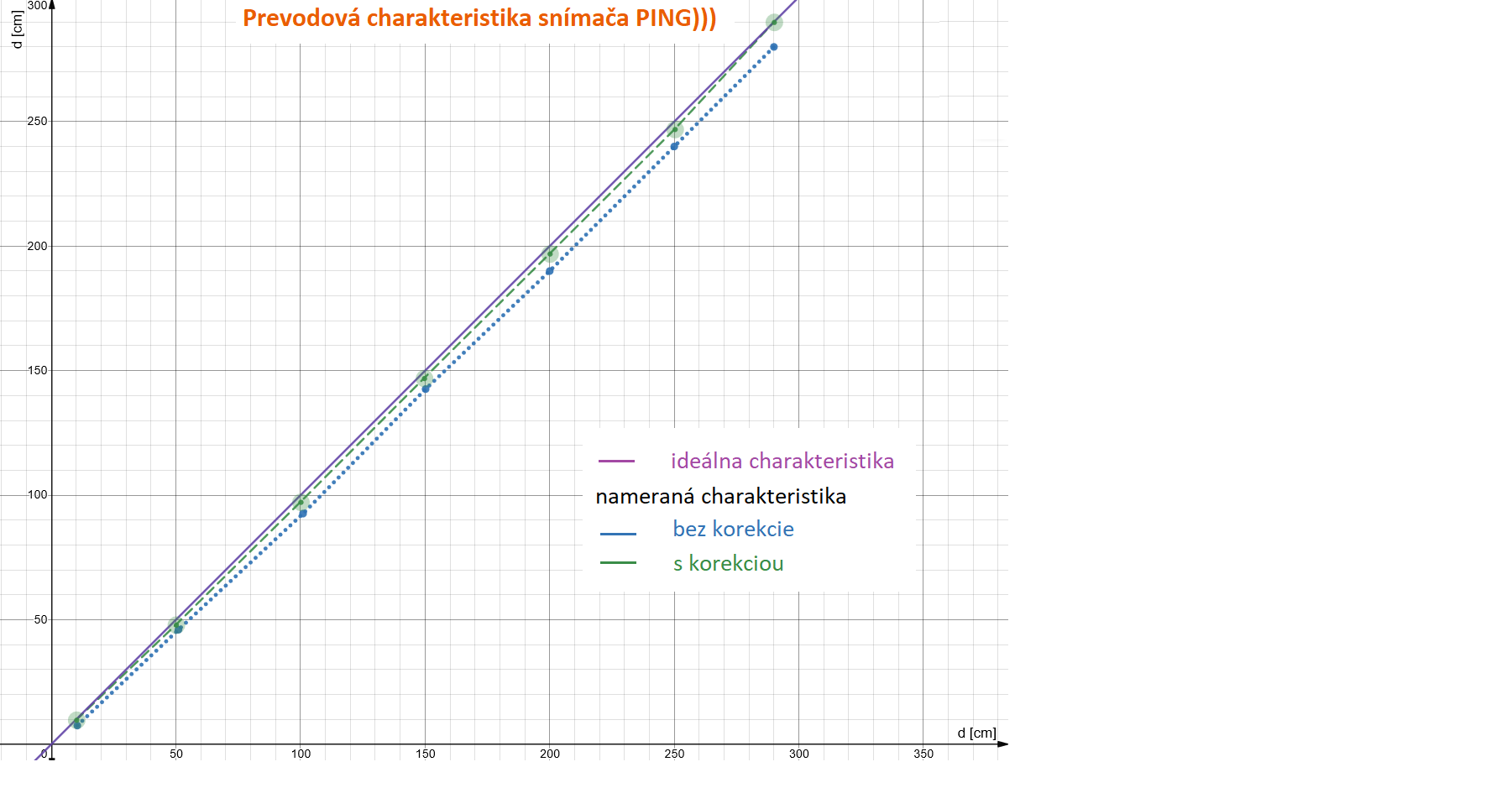
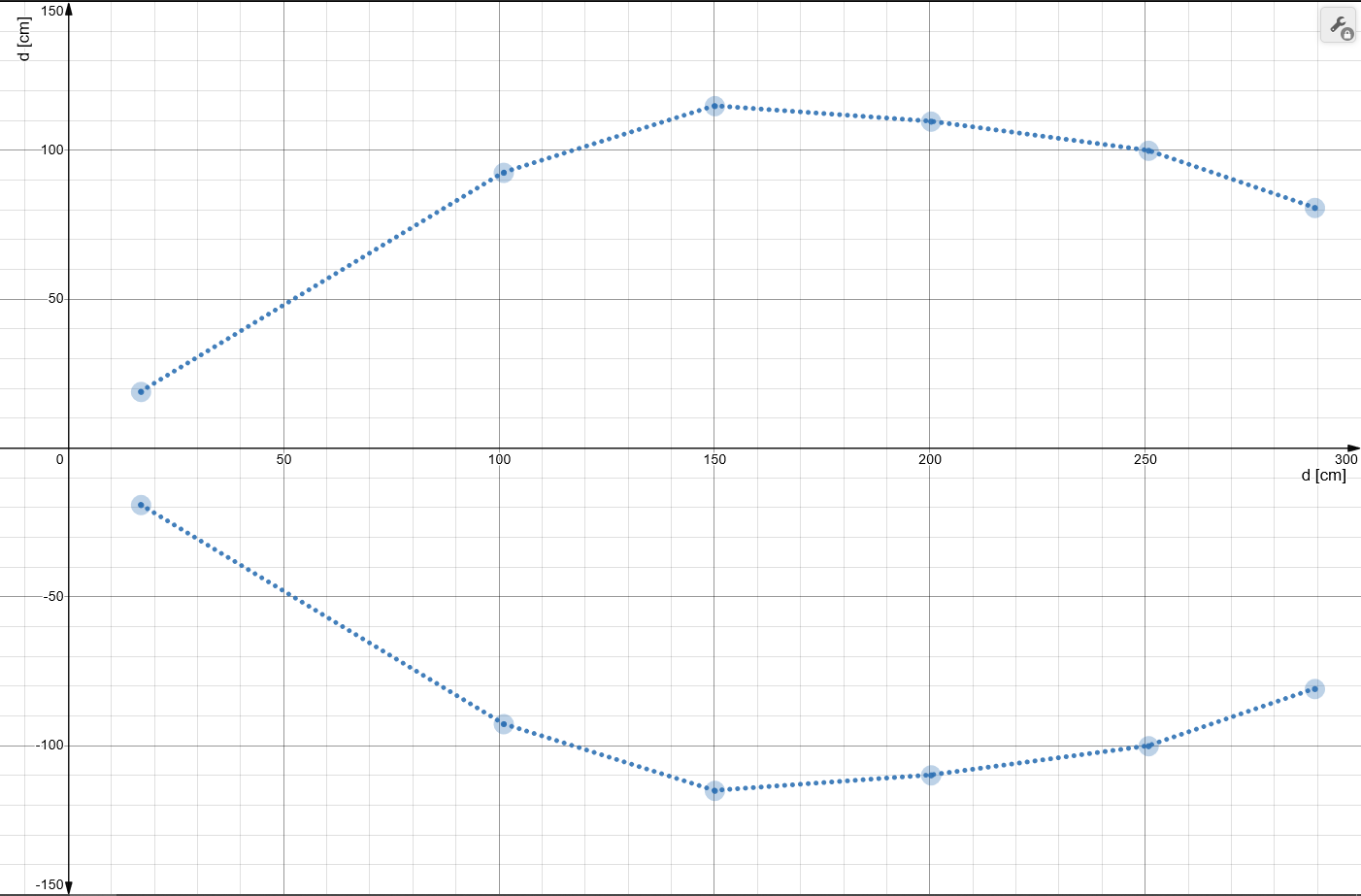
# '''Zmerajte prevodovú charakteristiku snímača''' s kompenzáciou a bez kompenzácie (tabuľka + grafická závislosť zmeranej vzdialenosti od skutočnej) | # '''Zmerajte prevodovú charakteristiku snímača''' s kompenzáciou a bez kompenzácie (tabuľka + grafická závislosť zmeranej vzdialenosti od skutočnej) - [http://senzor.robotika.sk/mems/charakteristikaUZ01.png príklad] | ||
# Zmerajte '''kritický uhol''' pre vzdialenosť 50, 100 a 150 cm. | # Zmerajte '''kritický uhol''' pre vzdialenosť 50, 100 a 150 cm. | ||
# Zmerajte '''vyžarovaciu charakteristiku''' senzora | # Zmerajte '''vyžarovaciu charakteristiku''' senzora - [http://senzor.robotika.sk/mems/charakteristikaUZ02.png príklad] | ||
# Zmerajte minimálnu veľkosť detekovanej prekážky | # Zmerajte minimálnu veľkosť detekovanej prekážky | ||
# Určte minimálnu a maximálnu detekovanú vzdialenosť | # Určte minimálnu a maximálnu detekovanú vzdialenosť | ||
# Nájdete objekt neviditeľný pre tento senzor? | # Nájdete objekt neviditeľný pre tento senzor? | ||
= Ultrazvukový senzor na meranie vzdialenosti = | = Ultrazvukový senzor na meranie vzdialenosti = | ||
Aktuálna revízia z 14:41, 26. apríl 2022
Ultrazvukové snímače
Zadanie pre ultrazvukový snímač
- Zmerajte dobu odozvy UZ snímača pri odraze od prekážky
- Prepočítajte zmeranú dobu odozvy na vzdialenosť v cm (výpočet)
- Pridajte kompenzáciu na vplyv teploty (výpočet)
- Zmerajte prevodovú charakteristiku snímača s kompenzáciou a bez kompenzácie (tabuľka + grafická závislosť zmeranej vzdialenosti od skutočnej) - príklad
- Zmerajte kritický uhol pre vzdialenosť 50, 100 a 150 cm.
- Zmerajte vyžarovaciu charakteristiku senzora - príklad
- Zmerajte minimálnu veľkosť detekovanej prekážky
- Určte minimálnu a maximálnu detekovanú vzdialenosť
- Nájdete objekt neviditeľný pre tento senzor?
Ultrazvukový senzor na meranie vzdialenosti

Na tomto cvičení budeme používať ultrazvukový senzor firmy Parallax s názvom PING))) Ultrasonic sensor.
- PING)))™ Documentation v1.6 (.pdf)
Vlastnosti:
- Rozsah merania 2 cm až 3 m
- Ovládanie cez jeden jediný pin
- Indikačná LED dióda signalizuje začiatok merania
- Spotreba 20 mA
- Úzky vyžarovací uhol
Technické údaje:
- Napájanie: +5 VDC
- Spustenie merania: kladný TTL impulz
- Rozmery: 22 x 46 x 16 mm
- Pracovná teplota: 0 až +70 °C
Princíp činnosti
Snímač Ping meria vzdialenosť podobne ako sonar; najskôr sa vysiela ultrazvukový (frekvencia je nad hranicou ľudského sluchu) impulz (chirp) a vzdialenosť k cieľu sa určuje meraním času, ktorý je potrebný na zachytenie ozveny (echa). Výstupom zo snímača je impulz s premenlivou šírkou, ktorý zodpovedá vzdialenosti k cieľu.


Senzor detekuje objekty tak, že vyšle krátky ultrazvukový signál a potom "počúva" ozvenu. Celý proces riadi mikroprocesor. Najskôr vyšle krátky impulz, ktorý spustí odvysielanie krátkeho 40 kHz (ultrazvuk) impulzu.
Ten sa šíri vzduchom, narazí na objekt a potom sa odrazí späť k snímaču. Medzitým mikroprocesor otočí smer na riadiacom pine, prepne sa do vstupného režimu a počíta, za ako dlho zachytí odozvu (echo). Čas medzi vyslaním a prijatím impulzu je proporcionálna k vzdialenosti objektu.
Vzorový program na meranie
int pingPin = 11;
void setup()
{
Serial.begin(9600);
}
void loop()
{
long duration;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// We give a short LOW pulse beforehand to ensure a clean HIGH pulse.
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
Serial.print(duration);
Serial.print("us");
Serial.println();
delay(100);
}
Funkcia pulseIn()
Opis
Načíta dĺžku impulzu (buď HIGH alebo LOW) na danom pine. Ak napríklad hodnota 'value; je HIGH, funkcia 'pulseIn()' počká, kým sa log. úroveň na danom pine zmení na HIGH a začne počítať (merať čas). Potom čaká, kým sa hodnota zmení na úroveň LOW a zastaví počítanie. Funkcia vráti dĺžku impulzu v mikrosekundách. Keďže funkcia je blokujúca, má aj tretí parameter 'timeout' - po jeho vypršaní fukcia skončí a vráti 0.
Časovanie tejto funkcie autori odvodili metódou pokus-omyl (teda empiricky) a preto pre dlhšie impulzy vykazuje nepresnosti. Funkcia dokáže pracovať s impulzmi od 10 mikrosekúnd až po 3 min.
Syntax
pulseIn(pin, value) pulseIn(pin, value, timeout)
Parametre
pin: číslo pinu, na ktorom chceme merať impulz. (int)
value: aký impulz chceme merať HIGH alebo LOW. (int)
timeout (nepovinný): koľko mikrosekúnd čakať na začiatok impulzu; default hodnota je 1 sekunda (unsigned long)
Návratová hodnota
dĺžka impulzu v mikrosekundách, alebo 0 ak impulz nezačal do daného timeoutu (unsigned long)
Program na meranie a zobrazovanie na LCD displej
Nasledovný program vyšle echo, zmeria čas za ktorý sa vráti a vypíše ho na displej v mikrosekundách. Na meranie môžete použiť priamo tento program, hodnoty v mikrosekundách si zapisujte a výpočty spravte dodatočne.
Nezabudnite nastaviť hodnotu premennej `pingPin` na ten pin, kam skutočne senzor pripojíte.
Poznámka: tento program možno po odkomentovaní niektorých častí použiť aj na meranie so senzorom HCSR-04 (lacnejší klon, ktorý však využíva dva oddelené piny na štart a meranie).
/*
LiquidCrystal Library - Hello World
Demonstrates the use a 8x2 LCD display.
The circuit:
* LCD RS pin to digital pin 3
* LCD R/W pin to digital pin 2
* LCD Enable pin to digital pin 1
* LCD D4 pin to digital pin 4
* LCD D5 pin to digital pin 5
* LCD D6 pin to digital pin 6
* LCD D7 pin to digital pin 7
*/
#include <LiquidCrystal.h> // include the library
// initialize the library with the numbers of the interface pins
// LiquidCrystal(RS, RW, EN, D4, D5, D6, D7)
LiquidCrystal lcd( 3, 2, 1, 4, 5, 6, 7);
int pingPin = 11;
const int trigPin = 11;
const int echoPin = 12;
void setup() {
// set up the LCD's number of columns and rows:
lcd.begin(8, 2);
// Print a message to the LCD.
lcd.print("Time[us]");
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
long duration1;
long duration2;
int distanceCm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// We give a short LOW pulse beforehand to ensure a clean HIGH pulse.
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration1 = pulseIn(pingPin, HIGH);
// // Simillar for the HSR-04 sensor
// digitalWrite(trigPin, LOW);
// delayMicroseconds(2);
// digitalWrite(trigPin, HIGH);
// delayMicroseconds(10);
// digitalWrite(trigPin, LOW);
// duration2 = pulseIn(echoPin, HIGH);
// set the cursor to column 0, line 1
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(0, 1);
lcd.print(" ");
lcd.setCursor(0, 1);
// print the number of seconds since reset:
//lcd.print(millis()/1000);
lcd.print(duration1);
// distanceCm= duration2*0.034/2;
// lcd.print(distanceCm);
delay(200);
}
Zapojenie
Pripojenie senzora k mikroprocesoru je ve+lmi jednoduché: základom je pripojiť správne napájanie (+5V) na vstup Vcc, a zem na GND. Potom už ostane len pripojiť Start/Echo spoločný vstup/výstup na niektorý z pinov procesora. Podľa skutočného zapojenia je potom potrebná aj príslušná zmena v ovládacom programe. Na meranie je zrejme najvhodnejšie zapichnúť senzor na okraj univerzálnej prepojovacej doštičky, ale ak chcete, dá sa využiť aj prepojovací ohybný káblik zapojený priamo do konektora na hornom okraji Acrob dosky.

Zdroje chýb merania
Teplota vzduchu
Na meranie najviac vplývajú meniace sa atmosférické podmienky. Vietor a prúdenie vzduchu vykompenzovať nevieme. Okrem toho však na meranie najviac vplýva
teplota, vlhkosť, zmeny tlaku a útlm signálu. V literatúre možno nájsť niekoľko vzťahov pre kompenzáciu vplyvu teploty a vlhkosti, tu uvedieme dva z nich:

kde
- - je rýchlosť zvuku pri teplote 0 °C a relatívnej vlhkosti 0% RH (c0 = 331,5 [m/s]),
- - teplotný koeficient rýchlosti (pri 0° C), γ = 1.83 10-3 [°C-1],
- - koeficient vlhosti (AV = 2,2 . 10^-4, pre frekvencie 50 ÷ 200 kHz),
- - relatívna vlhkosť vzduchu humidity of air [%],
- - teplota vzduchu [°C].





{kind=link}
{kind=link}
Pre praktické účely sa často vplyv vlhkosti zanedbáva a používa sa len zjednodušený korekčný vzťah:
V rozsahu teplôt 0 až 70 °C je korekcia na teplotu veľmi dôležitá, chyba dosahuje veľksoť až 11-12 percent. Vhodnú kompenzačnú funkciu môžete implementovať priamo do programu, alebo kompenzáciu dopočítate dodatočne pri spracovaní nameraných dát.

Neistoty pri detekcii objektov ultrazvukovým senzorom.
Zdroj:
Tareen, Shaharyar Ahmed Khan. (2016). Design & Development of THE ROBUST – An Autonomous Mobile Robot. Journal of Space Technology. 6. 14-23.
Kritický uhol
Kritický uhol je taký uhol, pod ktorým dopadá ultrazvuková vlna na prekážku, kedy sa väčšina odrazí smerom od senzora a ten potom nezaregistruje žiaden odraz. Meranie kritického uhla robíme podložkou, ktorú otáčame dovtedy, kým nameraná vzdialenosť zodpovedá skutočnej. Po prudkej zmene detekovanej vzdialenosti zapíšeme hodnotu kritického uhla v danej vzdialenosti.

Vyžarovacia charakteristika
Vyžarovaciu charakteristiku meriame tak, že zboku, kolmo na os senzora, pomaly zasúvame dostatočne veľkú prekážku. Akonáhle ju senzor začne detekovať, zapíšeme si vzdialenosť od kolmice a takto získané údaje vykreslíme do grafu.

Potrebujete pravítko, alebo uhlomer?

Ak nemôžete prísť na cvičenie do laboratória, aspoň čiastočne si ho môžete nahradiť simulátorom TinkerCAD.
Nepovinná domáca úloha
Mobilný robot na Marse je natočený smerom na východ. Ultrazvukový otočný senzor zmeral
objekty, ktoré treba preskúmať v nasledovných troch smeroch (uvedená je vždy séria niekoľkých meraní v stupňoch):
- a) 85, 95, 110, 90
- b) 350, 360, 0, 10
- c) 350, 360, 10, 360
Všetky tri sa nachádzajú vo vzdialenosti 100 m. Vypočítajte priemernú hodnotu a smerodajnú odchýlku a na základe
toho rozhodnite:
Ktorým smerom sa má vydať na prieskum, aby minul čo najmenej času a energie na otáčanie?