{kind=link}
{kind=link}
{kind=link}
{kind=link}
Dtv2019 sbr PID vypocet zasahu.png: Rozdiel medzi revíziami
Zo stránky SensorWiki
Časť zdrojového súboru pre projekt Self-balancing robot. Zobrazuje výpočet akčného zásahu pomocou PID algoritmu. |
(Žiaden rozdiel)
|
{kind=link}
Aktuálna revízia z 14:41, 8. jún 2019
Časť zdrojového súboru pre projekt Self-balancing robot. Zobrazuje výpočet akčného zásahu pomocou PID algoritmu.
História súboru
Po kliknutí na dátum/čas uvidíte ako súbor vyzeral vtedy.
| Dátum/Čas | Náhľad | Rozmery | Používateľ | Komentár | |
|---|---|---|---|---|---|
| aktuálna | 14:41, 8. jún 2019 | 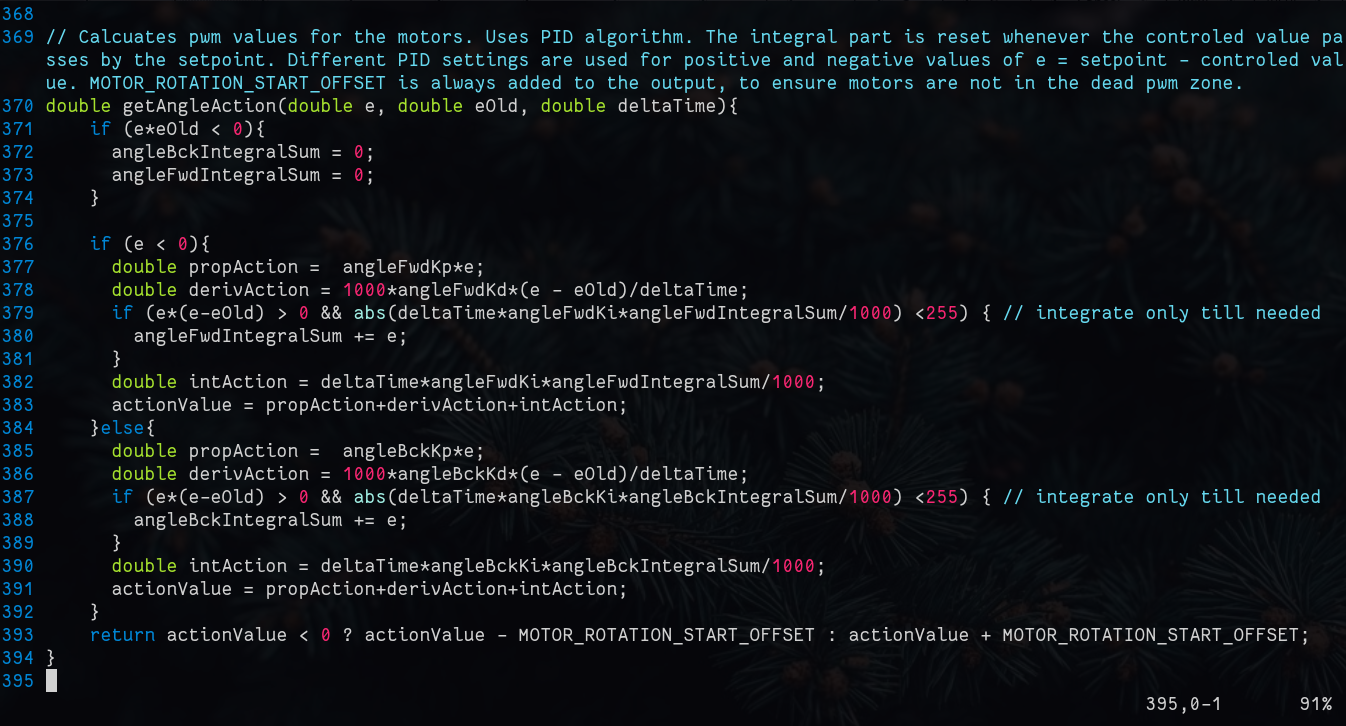 | 1 346 × 726 (766 KB) | StudentDTV (diskusia | príspevky) | Časť zdrojového súboru pre projekt Self-balancing robot. Zobrazuje výpočet akčného zásahu pomocou PID algoritmu. |
Tento súbor nemôžete prepísať.
Použitie súboru
Na tento súbor odkazuje nasledujúca stránka:
{kind=link}